Зъбните механизми служат за предаване на въртеливо движение от един вал на друг, за промяна на големината и посоката на ъгловата скорост и въртящия момент.
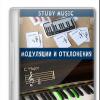
Въз основа на относителното разположение на валовете се разграничават плоски и пространствени зъбни колела. При плоските механизми осите на въртене на връзките са успоредни и всички връзки се въртят в успоредни равнини. В този случай въртенето се предава с постоянно предавателно отношение с помощта на кръгли цилиндрични колела (фиг. 1).
|
|
|

При пространствените зъбни колела осите на въртене на връзките се пресичат (конусни зъбни колела) или кръстосани (червячни, винтови, спироидни и хипоидни зъбни колела).
Има външни (фиг. 1.а), вътрешни (фиг. 1.б) и зъбни колела.
Съотношението на ъгловата скорост на задвижващия вал j към ъгловата скорост на задвижвания вал k се нарича предавателно отношение и се обозначава с буквата "u" със съответните индекси:
Знакът плюс се отнася за вътрешна предавка, а знакът минус се отнася за външна предавка. За получаване на големи предавателни отношения се използват по-сложни многостепенни зъбни механизми.
Степен на зъбно колело е предаване между две връзки, разположени на най-близките неподвижни оси. Броят на стъпките в зъбните механизми е равен на броя на неподвижните оси минус една.
Стъпките са прости и планетарни. На фиг. 2. A и C - прости, B - планетарни етапи. Ако скоростта на въртене на задвижвания вал е по-малка от скоростта на въртене на задвижващия вал, тогава такъв механизъм се нарича скоростна кутия.
Зъбните механизми с колела, които са неподвижни спрямо стойката, се разделят на обикновени и стъпаловидни. При обикновените механизми (фиг. 3) всяка ос има едно колело. При стъпковите механизми всяка ос, с изключение на задвижващата и задвижваната, има две колела. На фиг. 4. показва схема на тристепенен механизъм. За него
|
|

При предаване на въртене през конусни колела знакът на предавателното отношение се определя от правилото на стрелките (фиг. 2.5). Ако стрелките на задвижващите и задвижваните колела, разположени на успоредни валове, са насочени в една и съща посока, тогава предавателното отношение ще бъде със знак плюс, ако в противоположни посоки, тогава със знак минус.
|
|
|


За механизма, показан на фиг. 5.

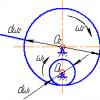
Зъбните механизми, които имат колела, чиито оси се движат в пространството, се наричат сателити (фиг. 2.6а). Колела 1 и 3, въртящи се около фиксирана централна ос, се наричат централни, а колело 2, чиято ос се движи в пространството, се нарича сателит. Връзка H, в която е фиксирана оста на сателита 2, се нарича носач.
|
|
|


Сателитните механизми с две или повече степени на свобода се наричат диференциални, а тези с една степен планетарни.
Връзката между ъгловите скорости на връзките може да се определи с помощта на метода на обръщане на движението. Същността му се състои в това, че всички връзки на механизма получават допълнително въртене с ъглова скорост, равна по големина на ъгловата скорост на въртене на носача, но противоположна по посока (-ω n). В същото време носачът психически спира и диференциалният механизъм се превръща в обратен механизъм, при който осите на всички колела са неподвижни. Новите ъглови скорости на връзките при обратно движение са равни
Предавателното отношение от първата връзка към третата за реверсивния механизъм има формата
Формула (4) се нарича формула на Уилис, където за специфичен механизъм съгласно фиг. 6,а
При дадени две скорости формула (4) може да се използва за определяне на третата скорост.
Обърнете внимание, че формулата на Уилис може да бъде написана за всеки две връзки. Например, съгласно формула (5)
Тъй като ω3=0, тогава
В някои случаи е препоръчително да се използват комбинирани зъбни механизми, съставени от зъбни колела от различни видове. Например механизмът, показан на фиг. 2.2, има две прости степени и една планетарна степен. Предавателно отношение на целия механизъм

В технологията се използват сателитни механизми, състоящи се от диференциал, между чиито водещи връзки е монтирана междинна предавка. Това предаване налага допълнително условие за свързване и диференциалният механизъм се превръща в сложен планетарен механизъм с една степен на подвижност. Такъв механизъм се нарича затворен диференциал.
В задачите зъбното предаване от електродвигателя до последното (изходно) колело включва както прости предавания (с неподвижни оси), така и планетарни или диференциални (с подвижни оси). За да се изчисли броят на оборотите на изходната връзка, е необходимо цялото предаване да се раздели на зони: преди диференциала, диференциалната зона и след диференциала. За всяка зона се определя предавателното отношение. За зоните преди диференциала и след диференциала предавателното отношение се определя от прякото съотношение на ъгловите скорости на зъбните колела или обратното съотношение на броя на зъбите им. Числото, изразено като отношение на броя на зъбите, трябва да се умножи по (-1) m, където m е броят на външните зъбни колела. Предавателното отношение за диференциалната зона се определя с помощта на формулата на Willis.
Общото предавателно отношение се определя като произведение на предавателните числа на всички зони.
Разделяйки оборотите на входящия вал на цялата зъбна предавка на общото предавателно число, получаваме оборотите на изходната връзка.
Следващият етап е кинематично изследване на това предаване с помощта на графичен метод. За да направите това, трябва да начертаете диаграма на зъбно колело от дясната страна на листа, след като го разделите на две приблизително равни части. От лявата страна е предвидена конструкцията на зацепването.
Диаграмата на механизма е начертана в мащаб, пропорционален на броя на зъбите на колелата, т.к Диаметрите на колелата са пропорционални на тях. Вдясно на диаграмата е построена картина на линейните скорости на точките на зъбния механизъм, а под нея е картина на ъгловите скорости. Резултатите, получени от модела на ъгловата скорост, се сравняват с резултатите, получени аналитично.
Нека разгледаме един пример.
При тези задачи е необходимо да можете да определите предавателните отношения между връзките на механизма.
Кинематичен анализ на планетарен механизъм
1. Определете степента на мобилност на механизма:
В този механизъм подвижните връзки са 1, 2, 3, 4, H. Следователно долните кинематични двойки образуват връзки 1 със стойката, 2 с носача H, колело 3 и стойката образуват две долни кинематични двойки, връзка 4 със стойката. Общо Висши кинематични двойки се образуват в зацепванията на колелата, т.е. в точки A, B, C и D. Общо
2. От условието за подравняване намираме неизвестния брой зъби, т.е. И
3. Записваме формулата на Уилис за всяка планетарна зона. За зона 1-2-3-Н:
За зона 1-4-3:
Обърнете внимание, че този израз е получен от уравнение (2). Нека заместим получената стойност в уравнение (1):
![]()
![]()
Този израз представлява желаното предавателно отношение
![]()
Графичен метод (Фигура 14)
Графичният метод е необходим за проверка на правилността на аналитичното изчисление.
Поставяме всички точки на цилиндричните зъбни колела на механизма на полюсната линия. Освен това се съгласяваме, че ще обозначим с щрихи тези точки на механизма, скоростта
|

Проектираме точка b върху снимка 3, след което свързваме точки b и и получаваме картина 2, върху която проектираме точка След това свързваме точката с точка O. Получаваме картина H.
След това, след като получихме полюсната точка m, начертаваме произволен сегмент m-S. От точка S изчертаваме лъчи, успоредни на снимки 1, 2, 3, 4, H. В резултат на това получаваме векторите: , , , , . Желаното предавателно отношение се изразява със следното отношение: ![]() .
.
Синтез на зъбно колело (Фигура 15).
Радиуси на началните кръгове:
![]()
където е радиусът на началната окръжност на 4' колелото.
![]()
където е радиусът на началната окръжност на 3’ колелото;
Радиуси на основните кръгове:
Стъпете по първоначалния кръг:
Размери на зъбите: височина на главата ![]()
височина на краката
Радиуси на кръга на главата: 
Радиуси на обиколката на краката: 
Дебелина на зъба и ширина на кухината по първоначалния кръг:
![]()
Централно разстояние:
След като конструираме предавката, намираме коефициента на припокриване

където: - дължина на дъгата на зацепване;
Годежна стъпка;
Дължина на практичната част на ангажежната линия;
Ъгъл на зацепване.

Стойността на коефициента на припокриване трябва да се сравни с неговата стойност, определена аналитично:

Сравнителна таблица
СПЕЦИАЛНИ МАСИ
Това ръководство съдържа таблици. 9.1-9.5 за неравнопреместено зацепване, съставител проф. В.Н. Кудрявцев и табл. 9.6 за неравномерно предаване, съставен от ЦКБР (Централно конструкторско бюро за производство на скоростни кутии).
Таблици на проф В.Н. Кудрявцев съдържат стойностите на коефициентите ξ 1 и ξ 2, чиято сума ξ е максимално възможната, ако са изпълнени основните изисквания, посочени по-горе.
Данните, дадени в тези таблици, трябва да се използват, както следва:
1. Ако 2 ≥u 1,2 ≥ 1, тогава първо в таблицата. 9.2, при даден Z 1 се намира коефициентът ψ След това в таблица 9.3 при Z 1 и Z 2 се намират коефициентите ξ 1 и ξ 2. Коефициентите ξ C и α се определят по формули (виж по-долу). Ъгълът на зацепване се определя с помощта на номограма.
2. Ако 5 ≥u 1,2 ≥2, тогава първо в таблицата. 9.4, при Z 1, намерете коефициентите ψ и ξ 1. След това в табл. 9.5, при Z 1 и Z 2, намерете коефициента ξ 2. След това продължете както е описано.
Таблица 9.6 съдържа коефициенти на изместване за предавка с равно изместване.
При избора на тези коефициенти, в допълнение към основните изисквания, е изпълнено изискването най-големите стойности на коефициентите λ 1 и λ 2 на краката да са достатъчно малки и също равни една на друга. При използване на таблицата. 9.6, трябва да запомните, че условието Z C ≥34 трябва да бъде изпълнено.
Формули за определяне на ξ C и α:
ξ С = ξ 1 + ξ 2
ψ =ξ С - α.
Таблица 9.1 -Стойности на коефициента за неравномерно изместено зацепване при 2 ≥u 1,2 ≥ 1
| Z 1 | |||||||
| 0.127 | 0.145 | 0.160 | 0.175 | 0.190 | 0.202 | 0.215 | |
| Z 1 | |||||||
| 0.227 | 0.239 | 0.250 | 0.257 | 0.265 | 0.272 | 0.276 |
Таблица 9.2
| Z 1 | ||||||||||||||
| Z 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 |
| 0.390 | 0.395 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0.430 | 0.372 | 0.444 | 0.444 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0.464 | 0.354 | 0.479 | 0.423 | 0.486 | 0.486 | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0.513 | 0.341 | 0.515 | 0.400 | 0.524 | 0.462 | 0.525 | 0.425 | -- | -- | -- | -- | -- | -- | |
| 0.534 | 0.330 | 0.543 | 0.386 | 0.557 | 0.443 | 0.565 | 0.506 | 0.571 | 0.571 | -- | -- | -- | -- | |
| 0.551 | 0.322 | 0.566 | 0.376 | 0.588 | 0.426 | 0.600 | 0.485 | 0.609 | 0.547 | 0.608 | 0.608 | -- | -- | |
| 0.568 | 0.317 | 0.589 | 0.365 | 0.614 | 0.414 | 0.631 | 0.468 | 0.644 | 0.526 | 0.644 | 0.586 | 0.646 | 0.646 | |
| 0.584 | 0.312 | 0.609 | 0.358 | 0.636 | 0.405 | 0.661 | 0.452 | 0.677 | 0.508 | 0.678 | 0.566 | 0.683 | 0.624 | |
| 0.601 | 0.308 | 0.626 | 0.353 | 0.659 | 0.394 | 0.686 | 0.441 | 0.706 | 0.492 | 0.716 | 0.542 | 0.720 | 0.601 | |
| 0.617 | 0.303 | 0.646 | 0.345 | 0.676 | 0.389 | 0.706 | 0.433 | 0.731 | 0.481 | 0.744 | 0.528 | 0.756 | 0.580 | |
| 0.630 | 0.299 | 0.663 | 0.341 | 0.694 | 0.384 | 0.726 | 0.426 | 0.754 | 0.472 | 0.766 | 0.519 | 0.781 | 0.568 | |
| -- | 0.297 | 0.679 | 0.337 | 0.714 | 0.376 | 0.745 | 0.419 | 0.775 | 0.463 | 0.793 | 0.507 | 0.809 | 0.554 | |
| -- | -- | 0.693 | 0.334 | 0.730 | 0.372 | 0.763 | 0.414 | 0.792 | 0.458 | 0.815 | 0.497 | 0.833 | 0.543 | |
| -- | -- | 0.706 | 0.333 | 0.745 | 0.369 | 0.780 | 0.409 | 0.813 | 0.449 | 0.834 | 0.491 | 0.856 | 0.534 | |
| -- | -- | -- | -- | 0.758 | 0.368 | 0.796 | 0.405 | 0.830 | 0.445 | 0.854 | 0.483 | 0.878 | 0.525 | |
| -- | -- | -- | -- | 0.773 | 0.365 | 0.813 | 0.400 | 0.848 | 0.440 | 0.869 | 0.480 | 0.898 | 0.517 | |
| -- | -- | -- | -- | -- | -- | 0.826 | 0.399 | 0.862 | 0.438 | 0.892 | 0.470 | 0.916 | 0.511 | |
| -- | -- | -- | -- | -- | -- | 0.840 | 0.397 | 0.881 | 0.431 | 0.907 | 0.467 | 0.936 | 0.504 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 0.894 | 0.430 | 0.921 | 0.465 | 0.952 | 0.500 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 0.908 | 0.428 | 0.936 | 0.462 | 0.968 | 0.496 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 0.951 | 0.459 | 0.981 | 0.495 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 0.967 | 0.455 | 0.999 | 0.490 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,014 | 0.487 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,030 | 0.483 |
| Z 1 | ||||||||||||||
| Z 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 |
| 0,684 | 0,684 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,723 | 0,658 | 0,720 | 0,720 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,756 | 0,639 | 0,756 | 0,699 | 0,755 | 0,755 | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,792 | 0,617 | 0,793 | 0,676 | 0,793 | 0,731 | 0,782 | 0,782 | -- | -- | -- | -- | -- | -- | |
| 0,814 | 0,609 | 0,830 | 0,652 | 0,831 | 0,707 | 0,821 | 0,758 | 0,812 | 0,812 | -- | -- | -- | -- | |
| 0,849 | 0,588 | 0,860 | 0,636 | 0,866 | 0,686 | 0,861 | 0,732 | 0,850 | 0,787 | 0,839 | 0,839 | -- | -- | |
| Z 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 |
| 0,871 | 0,579 | 0,888 | 0,622 | 0,893 | 0,673 | 0,892 | 0,715 | 0,884 | 0,761 | 0,872 | 0,820 | 0,865 | 0,865 | |
| 0,898 | 0,566 | 0,915 | 0,609 | 0,926 | 0,654 | 0,925 | 0,696 | 0,924 | 0,742 | 0,913 | 0,793 | 0,898 | 0,845 | |
| 0,916 | 0,561 | 0,937 | 0,601 | 0,948 | 0,645 | 0,951 | 0,683 | 0,950 | 0,729 | 0,946 | 0,774 | 0,934 | 0,822 | |
| 0,937 | 0,552 | 0,959 | 0,592 | 0,976 | 0,632 | 0,976 | 0,672 | 0,984 | 0,708 | 0,979 | 0,755 | 0,966 | 0,804 | |
| 0,958 | 0,543 | 0,980 | 0,583 | 0,997 | 0,624 | 1,000 | 0,662 | 1,007 | 0,700 | 1,010 | 0,737 | 1,000 | 0,784 | |
| 0,976 | 0,537 | 0,997 | 0,578 | 1,018 | 0,615 | 1,023 | 0,651 | 1,031 | 0,689 | 1,038 | 0,723 | 1,033 | 0,764 |
Продължение на таблицата. 9.2
| 0,994 | 0,532 | 1,017 | 0,571 | 1,038 | 0,608 | 1,045 | 0,641 | 1,051 | 0,678 | 1,055 | 0,718 | 1,060 | 0,750 | |
| 1,011 | 0,528 | 1,038 | 0,562 | 1,056 | 0,602 | 1,065 | 0,634 | 1,075 | 0,669 | 1,084 | 0,701 | 1,081 | 0,741 | |
| 1,026 | 0,525 | 1,054 | 0,559 | 1,076 | 0,594 | 1,082 | 0,629 | 1,094 | 0,662 | 1,101 | 0,696 | 1,105 | 0,730 | |
| 1,041 | 0,522 | 1,071 | 0,554 | 1,093 | 0,589 | 1,102 | 0,622 | 1,114 | 0,655 | 1,121 | 0,689 | 1,127 | 0,729 | |
| 1,059 | 0,516 | 1,088 | 0,550 | 1,110 | 0,584 | 1,122 | 0,614 | 1,131 | 0,650 | 1,145 | 0,678 | 1,149 | 0,719 | |
| 1,072 | 0,515 | 1,102 | 0,547 | 1,127 | 0,580 | 1,140 | 0,608 | 1,154 | 0,639 | 1,163 | 0,672 | 1,170 | 0,702 | |
| 1,088 | 0,511 | 1,117 | 0,545 | 1,141 | 0,578 | 1,157 | 0,603 | 1,172 | 0,634 | 1,180 | 0,667 | 1,188 | 0,696 | |
| -- | -- | 1,131 | 0,542 | 1,159 | 0,573 | 1,172 | 0,601 | 1,187 | 0,631 | 1,200 | 0,659 | 1,206 | 0,690 | |
| -- | -- | 1,145 | 0,540 | 1,173 | 0,570 | 1,186 | 0,599 | 1,204 | 0,626 | 1,218 | 0,653 | 1,223 | 0,685 | |
| -- | -- | -- | -- | 1,187 | 0,568 | 1,201 | 0,595 | 1,222 | 0,622 | 1,232 | 0,651 | 1,241 | 0,680 | |
| -- | -- | -- | -- | 1,201 | 0,567 | 1,218 | 0,591 | 1,233 | 0,621 | 1,249 | 0,647 | 1,260 | 0,673 | |
| -- | -- | -- | -- | -- | -- | 1,231 | 0,589 | 1,250 | 0,616 | 1,265 | 0,643 | 1,276 | 0,669 | |
| -- | -- | -- | -- | -- | -- | 1,247 | 0,586 | 1,266 | 0,612 | 1,279 | 0,640 | 1,291 | 0,665 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 1,279 | 0,611 | 1,295 | 0,636 | 1,306 | 0,662 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 1,293 | 0,609 | 1,310 | 0,634 | 1,321 | 0,659 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,325 | 0,631 | 1,336 | 0,657 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,338 | 0,629 | 1,350 | 0,654 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,365 | 0,651 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,379 | 0,649 |
Таблица 9.3 -Стойности на коефициентите ψ и ξ 1 за неравномерно изместено външно зацепване при 5 ≥u 1,2 ≥2
| Z 1 | |||||||||||
| ψ | 0,16 | 0,17 | 0,18 | 0,19 | 0,20 | 0,21 | 0,22 | 0,23 | 0,24 | 0,25 | 0,25 |
| ξ 1 | 0,66 | 0,73 | 0,80 | 0,96 | 0,92 | 0,98 | 1,04 | 1,10 | 1,16 | 1,22 | 1,27 |
Таблица 9.4 -
| Z 1 | Стойности при Z 1 | ||||||||||
| 0,442 | 0,425 | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,501 | 0,486 | 0,471 | 0,463 | -- | -- | -- | -- | -- | -- | -- | |
| 0,556 | 0,542 | 0,528 | 0,522 | 0,518 | 0,512 | 0,505 | -- | -- | -- | -- | |
| 0,610 | 0,596 | 0,582 | 0,577 | 0,575 | 0,569 | 0,564 | 0,560 | 0,553 | 0,606 | -- | |
| 0,661 | 0,648 | 0,635 | 0,632 | 0,628 | 0,624 | 0,620 | 0,616 | 0,611 | 0,662 | 0,566 | |
| 0,709 | 0,696 | 0,685 | 0,684 | 0,682 | 0,676 | 0,674 | 0,671 | 0,667 | 0,716 | 0,623 | |
| 0,754 | 0,745 | 0,734 | 0,732 | 0,731 | 0,728 | 0,727 | 0,722 | 0,720 | 0,769 | 0,677 | |
| -- | 0,789 | 0,782 | 0,780 | 0,779 | 0,778 | 0,777 | 0,773 | 0,772 | 0,820 | 0,729 | |
| -- | -- | 0,822 | 0,825 | 0,826 | 0,827 | 0,825 | 0,823 | 0,821 | 0,868 | 0,778 | |
| -- | -- | -- | 0,866 | 0,870 | 0,872 | 0,874 | 0,871 | 0,869 | 0,916 | 0,828 | |
| -- | -- | -- | -- | 0,909 | 0,914 | 0,917 | 0,920 | 0,919 | 0,965 | 0,876 | |
| -- | -- | -- | -- | -- | 0,954 | 0,957 | 0,961 | 0,962 | 1,008 | 0,924 | |
| -- | -- | -- | -- | -- | -- | 0,998 | 1,010 | 1,003 | 1,048 | 0,964 | |
| -- | -- | -- | -- | -- | -- | -- | 1,042 | 1,046 | 1,088 | 1,005 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 1,086 | 1,129 | 1,045 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,087 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,131 |
Таблица 9.5 -Стойности на коефициента ξ 2 за неравномерно изместено външно зацепване при 5 ≥u 1,2 ≥2
| Стойности при Z 1 | ||||||||||||
| Z 1 | ||||||||||||
| -- | -- | -- | -- | -- | -- | 0,000 | -- | -- | -- | -- | -- | |
| -- | -- | -- | -- | -- | 0,060 | 0,032 | -- | -- | -- | -- | -- | |
| -- | -- | -- | -- | 0,124 | 0,094 | 0,060 | 0,030 | 0,000 | -- | -- | -- | |
| -- | -- | -- | 0,182 | 0,159 | 0,120 | 0,086 | 0,056 | 0,027 | 0,000 | -- | -- | |
| -- | -- | 0,241 | 0,220 | 0,181 | 0,144 | 0,110 | 0,080 | 0,052 | 0,025 | 0,000 | -- | |
| -- | 0,300 | 0,283 | 0,239 | 0,201 | 0,165 | 0,131 | 0,101 | 0,078 | 0,047 | 0,023 | 0,000 | |
| 0,358 | 0,343 | 0,299 | 0,256 | 0,219 | 0,183 | 0,149 | 0,119 | 0,092 | 0,067 | 0,043 | 0,021 | |
| 0,400 | 0,350 | 0,313 | 0,271 | 0,235 | 0,199 | 0,165 | 0,136 | 0,109 | 0,085 | 0,062 | 0,041 | |
| 0,400 | 0,350 | 0,326 | 0,285 | 0,248 | 0,213 | 0,180 | 0,151 | 0,125 | 0,101 | 0,079 | 0,058 | |
| 0,400 | 0,350 | 0,337 | 0,297 | 0,260 | 0,226 | 0,191 | 0,168 | 0,138 | 0,115 | 0,094 | 0,078 | |
| 0,400 | 0,350 | 0,347 | 0,308 | 0,271 | 0,238 | 0,205 | 0,178 | 0,152 | 0,128 | 0,107 | 0,087 | |
| 0,400 | 0,350 | 0,356 | 0,318 | 0,281 | 0,249 | 0,216 | 0,189 | 0,163 | 0,140 | 0,119 | 0,100 | |
| 0,400 | 0,350 | 0,364 | 0,327 | 0,291 | 0,258 | 0,226 | 0,199 | 0,173 | 0,150 | 0,130 | 0,111 |
Продължение от таблица 9.5
| 0,400 | 0,350 | 0,372 | 0,335 | 0,300 | 0,266 | 0,235 | 0,208 | 0,183 | 0,160 | 0,140 | 0,122 | |
| 0,400 | 0,350 | 0,379 | 0,343 | 0,308 | 0,274 | 0,243 | 0,216 | 0,192 | 0,170 | 0,150 | 0,132 | |
| 0,400 | 0,350 | 0,385 | 0,350 | 0,315 | 0,282 | 0,251 | 0,224 | 0,200 | 0,178 | 0,159 | 0,141 | |
| 0,400 | 0,350 | 0,390 | 0,363 | 0,329 | 0,296 | 0,265 | 0,236 | 0,215 | 0,194 | 0,175 | 0,158 | |
| 0,400 | 0,350 | 0,390 | 0,375 | 0,341 | 0,309 | 0,279 | 0,253 | 0,230 | 0,210 | 0,191 | 0,174 | |
| 0,400 | 0,350 | 0,390 | 0,385 | 0,353 | 0,322 | 0,293 | 0,266 | 0,246 | 0,226 | 0,207 | 0,190 | |
| 0,400 | 0,350 | 0,390 | 0,395 | 0,363 | 0,333 | 0,306 | 0,282 | 0,260 | 0,240 | 0,222 | 0,225 | |
| 0,400 | 0,350 | 0,390 | 0,409 | 0,378 | 0,350 | 0,325 | 0,301 | 0,280 | 0,260 | 0,242 | 0,235 | |
| 0,400 | 0,350 | 0,390 | 0,422 | 0,392 | 0,366 | 0,341 | 0,319 | 0,297 | 0,277 | 0,260 | 0,243 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,404 | 0,378 | 0,354 | 0,332 | 0,312 | 0,292 | 0,275 | 0,252 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,414 | 0,399 | 0,364 | 0,343 | 0,324 | 0,305 | 0,287 | 0,271 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,423 | 0,397 | 0,374 | 0,353 | 0,334 | 0,316 | 0,299 | 0,283 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,435 | 0,409 | 0,380 | 0,366 | 0,349 | 0,331 | 0,315 | 0,300 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,445 | 0,421 | 0,398 | 0,378 | 0,361 | 0,344 | 0,328 | 0,313 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,454 | 0,430 | 0,407 | 0,387 | 0,370 | 0,358 | 0,336 | 0,320 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,459 | 0,436 | 0,414 | 0,394 | 0,376 | 0,360 | 0,344 | 0,328 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,440 | 0,419 | 0,400 | 0,382 | 0,365 | 0,350 | 0,335 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,446 | 0,425 | 0,406 | 0,388 | 0,370 | 0,355 | 0,340 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,448 | 0,428 | 0,408 | 0,390 | 0,373 | 0,357 | 0,342 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,450 | 0,431 | 0,411 | 0,393 | 0,376 | 0,361 | 0,346 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,452 | 0,433 | 0,414 | 0,396 | 0,379 | 0,364 | 0,350 |
След това се определят основните параметри на зъбните колела.

Фигура 9.1- Външно зацепване
ПРИЛОЖЕНИЯ

Задачи по общи теми по машиностроене


| При сглобяване на механизми прикрепете | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkB 1 EkC | DkA 1 EkB | DkB 1 EkC | DkB 1 EkC | DkA 1 EkC | Брой зъби на зъбното колело на прикрепения механизъм | ||||||
| Номер на главния механизъм | Z 1 | Z/1 | Z 2 | Z/2 | Z 3 | Z/3 | ||||||||||||||||
| Брой допълнителни (свързващи) механизми | ||||||||||||||||||||||
| - | ||||||||||||||||||||||
| - | ||||||||||||||||||||||
| - | ||||||||||||||||||||||
| Броят на зъбите на главния механизъм | Z/1 | - | - | - | - | |||||||||||||||||
| Z 1 | - | |||||||||||||||||||||
| Z 2 | - | |||||||||||||||||||||
| Z 3 | - | - | - | - | - | - | ||||||||||||||||
| Z/3 | - | - | - | - | - | |||||||||||||||||
| Z 4 | - | - | ||||||||||||||||||||
| Z/4 | - | - | - | - | ||||||||||||||||||
| Z 5 | - | - | - | - | ||||||||||||||||||
| Z 6 | - | - |




Контролен списък
1. Механика на машините и нейните основни раздели;
2. Основни понятия и определения в теорията на механизмите;
3. Лостови механизми;
4. Гърбични механизми;
5. Зъбни механизми;
6. Клинови и винтови механизми;
7. Триещи механизми;
8. Механизми с гъвкави връзки;
9.
10. Механизми с електрически устройства;
11. Кинематични двойки и тяхната класификация;
12. Конвенционални изображения на кинематични двойки;
13. Кинематични вериги;
14. Структурна формула на обща кинематична верига;
15. Степен на движение на механизма;
16. Структурна формула на плоски механизми;
17. Устройство на плоски механизми;
18. Резервни механизми;
19. Структура на пространствените механизми;
20. Семейства механизми;
21. Основният принцип на формиране на механизмите и тяхната система за класификация;
22. Конструктивна класификация на плоски механизми;
23. Малко информация за структурната класификация на пространствените механизми;
24. Центроиди при абсолютно и относително движение;
25. Връзки между скоростите на звената на механизма;
26. Определяне на скорости и ускорения на връзки на кинематични двойки;
27. Център за мигновено ускорение и грамофон;
28. Обвиващи и обвиващи криви;
29. Центроидна кривина и взаимно обвиващи се криви;
30. Постоянно и първоначално движение на механизма;
31. Определяне на позициите на груповите връзки и конструиране на траектории, описани от точки на звена на механизма;
32. Определяне на скорости и ускорения от клас 2 групи;
33. Определяне на скорости и ускорения от клас 3 групи;
34. Построяване на кинематични диаграми;
35. Кинематично изследване на механизми по диаграмния метод;
36. Четири лентов шарнирен механизъм;
37. Коляно-плъзгащ механизъм;
38. Рокерни механизми;
39. Дефиниране на провизии;
40. Определяне на скорости и ускорения;
41. Основни кинематични зависимости;
42. Фрикционни предавки;
43. Механизми на тризвенни предавки;
44. Механизми на многозвенни предавки с неподвижни оси;
45. Планетарни предавки;
46. Механизми на някои видове скоростни кутии и скоростни кутии;
47. Зъбни предавки с гъвкави връзки;
48. Универсален шарнирен механизъм;
49. Двоен универсален шарнирен механизъм;
50. Пространствен механизъм с четири прътови панти;
51. винтови механизми;
52. Зъбни механизми за прекъснато и променливо движение на задвижваната връзка;
53. Механизми с хидравлични и пневматични устройства;
54. Основни цели;
55. Проблеми на мощностното изчисляване на механизмите;
56. Сили, действащи върху връзките на механизма;
57. Диаграми на сили, работи и мощности;
58. Механични характеристики на машините;
59. Видове триене;
60. Фрикционно плъзгане на неомаслени тела;
61. Триене в транслационна кинематична двойка;
62. Триене в винтова кинематична двойка;
63. Триене в ротационна кинематична двойка;
Изчисленията в този раздел ще бъдат извършени в съответствие с методологията, описана в , въз основа на следните първоначални данни:
Z 2 =57 - брой зъби на второто колело
Z 3 =58 - брой зъби на трета предавка
Z 4 =20 - брой зъби на четвърта предавка
Z 5 =95 - брой зъби на пета предавка
Z 6 =22 - брой зъби на шесто зъбно колело
u 1 =2s -1 - ъглова скорост на първа предавка
Нека разгледаме структурата на този зъбен механизъм.
Нека определим броя на етапите в механизма и да дадем техните характеристики. Петото и шестото колело образуват най-простата серия от стъпала - плосък зъбен механизъм с вътрешна предавка. Вторият етап, състоящ се от 1,2,3,4 предавки и лост H - носач, е планетарна серия с двуредов сателит с две външни предавки.
Целта на кинематичния анализ.
Целта на кинематичния анализ е да се определят предавателните отношения на всяка степен и на целия механизъм като цяло, както и ъгловите скорости на отделните определени връзки.
Да определим броя на зъбите Z 1.
Нека да определим липсващия брой зъби на планетарния механизъм Z 1. За да направим това, използваме условието за коаксиалност на централните връзки. Нека посочим разстоянието от център до център между централната ос и оста на въртене на сателитите.
a=R 1 +R 2 - условие за центровка на централната връзка.
Z 1 = Z 3 + Z 4 - Z 2
Z 1 =58+20-57=21
Нека начертаем схема на зъбния механизъм в мащаб.
µ z =95/95=1 1/mm
Нека определим размерите с помощта на сегмент, с помощта на който зъбните колела ще бъдат изобразени на колелото.
L Z5 =Z k /µ z =95/1=95 mm
Кинематичен анализ на зъбния механизъм графично.
За извършване на анализ с помощта на този метод е необходимо да се изпълни кинематична диаграма на механизма. Започваме кинематичния анализ от входната връзка.
V A =у 1 *R A =21m/s
V V = 1 * R V =58m/s
Нека изберем мащаба за построяване на план за линейните скорости на зъбния механизъм.
µ V =V A /(AO)=21/21=1(m/s)/mm
За входната връзка изграждаме план на линейните скорости. За да се изгради план, е достатъчно да се знаят скоростите на две точки, тъй като зависимостта е линейна. Проектираме върху точките на полюсната линия, чиито скорости са известни. От проекцията на точките начертаваме полюсните линии, перпендикулярни на мащаба, векторите на линейните скорости на посочените точки. Преминаваме към входната връзка, следвайки входната. На втората връзка намираме две точки, чиито скорости са известни. Проектираме тези точки върху полюсната линия. За намерените точки начертаваме известните вектори на линейните скорости. Въз основа на две известни точки изграждаме план на линейните скорости. Въз основа на построения план на линейните скорости ще начертаем диаграма на ъгловите скорости на връзките. През точка P начертаваме прави линии, успоредни на законите за разпределение на линейните скорости на линейния скоростен план. Сегментите на лъчевата диаграма с начало в точка O и край в точката на съответното число изобразяват ъгловите скорости на връзките, тъй като ъгловата скорост на входната връзка е известна, мащабният фактор за изграждане на диаграмата може да бъде определен.
µ u = u 1 /O 1 =2/1=2
Познавайки ъгловите скорости на връзките, ще определим предавателните отношения на всеки етап от механизма и целия механизъм като цяло.
Кинематичен анализ на зъбния механизъм чрез аналитичен метод.
Тъй като механизмът се състои от два етапа, неговото общо предавателно число може да се определи като произведение на предавателните отношения на всички негови етапи. Първо, определяме предавателното отношение на най-простата степен на предавка.
i 56 =Z 6 /Z 5 =22/95=0,23
Нека разгледаме комплекта планетарни предавки. Сложността на кинематичния анализ на планетарния механизъм се състои в това, че спътниците извършват сложни движения и следователно имат ъглова скорост на преносимо движение и относителна ъглова скорост спрямо носача. За решаване на проблема се използва принципът на спиране на превозвача. Методът на Willis се основава на принципа на спиране на носителя, чиято същност е следната. Планетарният механизъм е мислено заменен с обърнат механизъм.
Обобщеният механизъм е изграден по следния начин:
1) превозвачът се счита за неподвижен,
2) тъй като носачът е неподвижен, ъгловата скорост на носача се изважда от ъгловите скорости на всички връзки,
3) за всяка предавка можете да напишете формулата за предавателното отношение по отношение на броя на зъбите,
4) с помощта на математически трансформации можете да преминете от обратния механизъм към планетарния механизъм - оригиналния и да определите предавателните отношения за планетарния механизъм.
Да направим маса. Таблицата ще съдържа три колони: 1) брой части, които изграждат планетарния механизъм, 2) ъглови скорости на връзките при нормално движение, 3) ъглови скорости на връзката, когато носачът е спрян.
i 12 = (w 2 - w H)/(w 1 - w H) = -2,7
i34 =(n2-nH)/(-nH)=-0.34
w 2 = w 3 =3,06
sch 1 H =2-2,28=-0,28
sch 2 H =3,06-2,28=0,78
sch 3 H =3,06-2,28=0,78
sch 4 H =0-2,28=-2,28
Нека определим общото предавателно отношение на целия механизъм
2.2 Анализ на зъбния механизъм
За да определим предавателното отношение с помощта на графичен метод, изобразяваме дадения механизъм в мащаб, като вземем произволна стойност на модула (m = 10). Нека обозначим всички характерни точки на механизма - полюсите на зъбните колела и центровете на колелата. Начертаваме линия, перпендикулярна на осите на въртене на колелата, и проектираме всички характерни точки върху нея. Тъй като водещото звено е колело 1, представяме линейната скорост на неговия край (точка A) чрез вектор Aa с произволна дължина. Свързвайки точки a и O 1, получаваме линия на разпределение на линейните скорости на колело 1. Свързваме точка B с точка a и върху продължението на тази линия проектираме точка O 2, получаваме линия на разпределение на линейни скорости на колело 2. Чрез свързване на точки O 2, O 4 получаваме линия на разпределение на линейните скорости на колело 4. Върху продължението на линията Aa проектираме точка A / . Свързваме точка a / с точка c, за да получим разпределителната линия на колело 5. Проектираме точка O 5 върху тази линия. Свързваме точка O 5 с точка O H, получаваме разпределителна линия за крайната връзка - носача.
Предавателното отношение се определя чрез сегментите SH и S1
i 1Н = S 1 /S Н = 190/83 = 2,29
Тъй като сегментите SH и S1 са от една и съща страна на SP, предавателното отношение се получава със знак плюс.
Имаме диференциален механизъм

Di = ×100% = 3,9%
2.3 Проверка на изпълнението на условията за подравняване, близост и сглобяване на планетарния механизъм
Условието за подравняване представлява равенството на разстоянията център до център на двойки зъбни колела
r 1 + r 2 = r 3 – r 2 или z 1 + z 2 = z 3 – z 2
36 + 40 = 116 – 40 76 = 76
Условието за подравняване е изпълнено.
Условието за съседство определя възможността за разполагане на всички сателити около обиколката на техните центрове, без да се допират един до друг.
грях 
където K е броят на сателитите
При K= 2 sin>0,28
Състоянието на квартала е изпълнено.
Състоянието на сглобяване определя възможността за едновременно зацепване на всички сателити с централното колело. Това означава, че сборът от броя на зъбите на централните колела ще бъде кратен на броя на сателитите.
където C е всяко положително цяло число.
![]()
Условието за сглобяване е изпълнено.
По този начин планетарната част на даден зъбен механизъм отговаря на всички конструктивни изисквания.
3 Изчисляване на мощността на лостовия механизъм
Вариант 20
Първоначални данни:
| LBC = 0,5 |
където l i са дължините на връзките и разстоянието до центровете на масата на връзките от първоначалните им шарнири, m;
J si – инерционни моменти на връзките, kgm 2;
m i – маса на връзката, kg;
w 1 – ъглова скорост на задвижващото звено, s -1;
P nc - полезна съпротивителна сила, приложена към плъзгача 5, N;
P j 5 – инерционна сила на 5-та връзка, N.
Необходимо е да се определи балансиращата сила по метода на изолиране на структурни групи и метода на твърдия лост на N.E. Жуковски, налягането във всички кинематични двойки.
Начертайте план на механизма в мащаб m l
m l = l OA /OA = 0,2/40 = 0,005 m/mm.
Изграждаме план за скорост, завъртян на 90° спрямо мащаба
m v = V A /Pa = w 1 ×l OA /Pa = 60×3,14×0,2/94,2 = 0,4 m/s/mm.
Скоростта на точка B ще бъде определена чрез решаване на две векторни уравнения
V B = V A +V BA, V B = V C +V BC.
Точка d от скоростния план се определя от теоремата за подобие
BC/DC = Pb/Pd Pd = Pb×CD/BC = 64×40/100 = 25,6 mm. За да определим скоростта на точка E, съставяме векторното уравнение V E = V D +V ED и го решаваме. Изграждаме план за ускорение, завъртян на 180° спрямо мащаба
m a = a A /pa=w 1 2 ×l OA /pa = (60×3,14) 2 ×0,2/101,4 = 70 m/s 2 /mm.
Ускорението на точка В се определя спрямо точките А и С
a B = a A + a n BA + a t BA, a B = a C + a n CB + a t CB,
a n BA = w 2 2 ×l AB = (ab×m v / l AB) 2 × l AB = (84×0,4/0,6) 2 × 0,6 = 1881,6 m/s 2
a n BC = w 3 2 ×l BC = (Pb×m v / l BC) 2 × l BC = (64×0,4/0,5) 2 × 0,5 = 1310,7 m/s 2
Дължини на сегменти, изобразяващи нормални компоненти на ускорението
a n BA и a n BC върху плана за ускорение, определен, като се вземе предвид мащабът m a
an BA = a n BA /m a = 1881,6/70 = 26,9 mm
pn BC = a n BC /m a = 1310,7/70 = 18,7 mm
Позицията на точка d върху плана за ускорение се определя от теоремата за подобие
BC/DC = πb/πd πd = πb×CD/BC = 58×40/100 = 23,4 mm. За да определим ускорението на точка E, съставяме и решаваме векторното уравнение a E = a D +a n ED +a t ED. където a n ED =w 4 2 ×l ED =(V ED /l ED) 2 ×l ED = (de×m v /l DE) 2 ×l DE = (14×0,4) 2 /0,7 = 44,8 m / s 2 / мм
Дължина на сегмента в плана за ускорение
dn ED = a n ED /m a = 44,8/70 = 0,64 mm
Позицията на точките S 2, S 3, S 4 върху плана за ускорение се определя от теоремата за подобие от отношенията
AB/AS 2 = ab/aS 2 Þ aS 2 = ab×AS 2 /AB = 45×40/120 = 15 mm
BC/CS 3 = pb/pS 3 Þ pS 3 = pb×CS 3 /BC = 58×20/100 = 11,6 mm
DE/DS 4 = de/dS 4 Þ ds 4 = de×DS 4 /DE = 19×60/140 = 8,14 mm
Определяне на инерционните сили на връзките
При определяне на инерционните сили и моменти вземаме предвид, че планът на ускорението се конструира завъртян на 180°, така че пропускаме знака минус в изчисленията.
P j2 = m 2 ×a s2 = m 2 ×ps 2 ×m a = 60×86×70 = 361200 N
M j2 = J s2 ×e 2 = J s2 ×a t BA /l AB = J s2 ×n BA b×m a /l AB = 0,1×39×70/0,6 = 455 H×m
P j3 = m 3 × a s3 = m 3 × ps 3 × m a = 50 × 12 × 70 = 42000 H
M j3 = J s3 ×e 3 = J s3 ×a t BA /l B C = J s3 ×n B C b×m a /l B C = 0,06×55×70/0,5 = 462 H×m
P j4 = m 4 × a s4 = m 4 × ps 4 × m a = 50 × 21 × 70 = 73500 H
M j4 = J s4 ×e 4 = J s4 ×a t ED /l DE = J s4 ×n ED e×m a /l DE = 0,12×19×70/0,7 = 228 H×m
P j 5 = m 5 × a E = m 5 × pe × m a = 140 × 22 × 70 = 215600 H
Полезна съпротивителна сила, приложена към работната връзка (5)
P nc = -2 P j 5 = - 431200 H
Резултат в точка E R 5 = P j 5 + P nc = -215600 H Нанасяме изчислените сили и моменти върху плана на механизма. В точките S 2 , S 3 , S 4 прилагаме инерционни сили, а в точките А и Е съответно уравновесяваща сила - P y и произтичаща сила - R 5.
Под въздействието на приложените сили механизмът е в равновесие. Избираме първата структурна група (връзки 4,5) и разглеждаме нейното равновесие. В точки D и E, за да балансираме структурната група, прилагаме реакциите R 34 и R 05.
Нека създадем уравнение на равновесие
SM D = 0, P j4 × h 4 µ l + R 5 × h 5 µ l + R 05 × h 05 µ l - M j4 = 0
R 05 = (-P j4 × h 4 µ l - R 5 × h 5 µ l + M j4)/h 05 µ l = (-73500 × 2∙0,005- 215600 × 62∙0,005 + 228)/126∙ 0,005 = -106893.6 N
SP i = 0. P j 4 + R 5 + R 05 + R 34 = 0. Ние приемаме мащаба на силовия план
m p 1 = P j 4 /z j 4 = 73500/50=1470 N/mm
В този мащаб изграждаме силов многоъгълник, от който намираме
R 34 = z 34 × m p 1 = 112 × 1470 = 164640 H
Ние идентифицираме и разглеждаме равновесието на втората структурна група (връзки 2,3). За балансиране прилагаме:
в точка D – реакция R 43 = - R 34;
в точка А - реакция R 12;
в точка C – реакция R03.
SM B2 = 0, P j 2 × h 2 µ l - R t 12 × AB × µ l + M j 2 = 0,
R t 12 = (P j 2 × h 2 µ l + M j 2)/AB × µ l = (361200 × 50∙0,005 + 455)/120 × 0,005 = 151258,3 H
SM B3 = 0, P j 3 ×h 3 ×µ l + R t 03 ×BC×µ l +R 43 ×h 43 ×µ l - M j 3 = 0
R t 03 = - P j 3 × h 3 × µ l -R 43 × h 43 × µ l + M j 3 /BC × µ l,
R t 03 = - 42000×76×0,005-164640×31×0,005 + 462/100×0,005 = - 82034,4 N SP i = 0, R t 12 + P j 2 + R 43 + P j 3 + R t 03 + R n 03 + R n 12 = 0 . Приемаме мащаба на силовия план за тази структурна група
m p 2 = P j 2 /z j 2 = 361200/100 = 3612 N/mm
От многоъгълника на силите определяме получената реакция
R 12 = R n 12 + R t 12 и неговата стойност
R 12 = z 12 × m p 2 = 79 × 3612 = 285348 H
Разглеждаме равновесието на останалия първокласен механизъм. В точка O заместваме стелажа с реакция R 01 с произволна посока.
Съставяне на уравнения на равновесие
SM 0 = 0, P y × OA - R 21 × h 21 = 0.
Балансираща сила
P y = R 21 × h 21 /OA = 79935,9 H
SP i = 0, P y + R 21 + R 01 = 0.
Мащаб на силов план
m p 3 = R 21 /z 21 = 2850 N/mm
От триъгълника на силата намираме реакцията R 01
R 01 = z 01 × m p 3 = 99 × 2850 = 282150 H
Определяме налягането в кинематични двойки.
Кинематична двойка B (връзки 2,3). Разглеждаме уравнението на равновесието на връзката R 12 + P j 2 + R 32 = 0. За да го решим, използваме плана на силите на структурната група (2.3). Затварящият вектор z 32 е показан с пунктирана линия.
R 32 = z 32 × m p 2 = 24 × 3612 = 86688 H Налягането в кинематичната двойка E (връзки 4.5) се определя от решението на векторното уравнение R 5 + R 05 + R 45 = 0 R 45 = z 45 ×m p 1 = 162 × 1470 = 238140 N Ние обобщаваме стойностите на налягането във всички кинематични двойки на разглеждания механизъм в таблица. Таблица 4 - Стойности на налягането в кинематичните двойки на механизма
| кинематичен | 0 | А | IN | СЪС | д | ||
| Обозначаване | |||||||
| Стойност, Н | 282150 | 285348 | 86688 | 122808 | 164640 | 238140 | 106893.6 |
За да определим силата на балансиране по метода на Н. Е. Жуковски, начертаваме скоростен план, завъртян на 90 ° в намален мащаб. На този чертеж този план на скоростта съвпада с плана на скоростта на механизма. Използвайки теоремата за подобие, ние определяме позициите на точките S 2, S 3, S 4 на скоростния план.
AS 2 /AB = ak 2 /ab Þ as 2 = ab×AS 2 /AB = 84×40/120 = 28 mm
CS 3 /CB = Ps 3 /Pb Þ Ps 3 = Pb×CS 3 /CB = 64×20/100 = 12,8 mm
DS 4 /DE = dk 4 /de Þ ds 4 = de×DS 4 /DE = 14×60/140 = 6 mm
1.4 Построяване на диаграма на преместване на изходното звено. Диаграмата на преместване на изходната връзка се получава в резултат на конструиране на сегменти, които са взети от чертежа на плосък лостов механизъм в 12 позиции, като се вземе предвид мащабен коефициент 1,5.. Изграждане на скоростна диаграма на изходната връзка. Скоростната диаграма на изходната връзка се получава в резултат на графично диференциране...
24 0.00 0.00 14.10 14.10 9.30 9.30 58.02 58.02 2.4 Изследване на механизъм по метода на кинематичните диаграми Изследването на механизми по метода на диаграмите се извършва с цел: 1. Получаване на визуално представяне на закона за движение на обект на интерес за нас или връзка на механизъм. 2. Определяне на скорости и ускорения на точки или връзки въз основа на известния закон за преместване на точки или...