Zobratu mehānismi kalpo, lai pārsūtītu rotācijas kustību no vienas vārpstas uz otru, lai mainītu leņķiskā ātruma un griezes momenta lielumu un virzienu.
Pamatojoties uz vārpstu relatīvo stāvokli, izšķir plakanos un telpiskos pārnesumus. Plakanajos mehānismos saišu rotācijas asis ir paralēlas, un visas saites griežas paralēlās plaknēs. Šajā gadījumā rotācija tiek pārraidīta ar nemainīgu pārnesuma attiecību, izmantojot apaļus cilindriskus riteņus (1. att.).
|
|
|

Telpiskajos zobratos saišu rotācijas asis krustojas (koniskie zobrati) vai krustojas (tārpveida, skrūvju, spiroīda un hipoīda zobrati).
Ir ārējie (1.a att.), iekšējie (1.b att.) un zobstieņa zobrati.
Piedziņas vārpstas leņķiskā ātruma j attiecību pret piedziņas vārpstas leņķisko ātrumu k sauc par pārnesuma attiecību un apzīmē ar burtu “u” ar atbilstošajiem indeksiem:
Plusa zīme attiecas uz iekšējo pārnesumu, un mīnusa zīme attiecas uz ārējo pārnesumu. Lai iegūtu lielus pārnesumu skaitļus, tiek izmantoti sarežģītāki daudzpakāpju pārnesumu mehānismi.
Pārnesuma pakāpe ir transmisija starp divām saitēm, kas atrodas uz tuvākajām fiksētajām asīm. Pakāpju skaits zobratu mehānismos ir vienāds ar fiksēto asu skaitu mīnus viens.
Darbības ir vienkāršas un planētas. Attēlā 2. A un C - vienkāršas, B - planētu stadijas. Ja piedziņas vārpstas griešanās ātrums ir mazāks par piedziņas vārpstas griešanās ātrumu, tad šādu mehānismu sauc par pārnesumkārbu.
Pārnesumu mehānismi ar riteņu asīm, kas ir nekustīgas attiecībā pret statīvu, tiek sadalītas parastajos un pakāpju mehānismos. Parastos mehānismos (3. att.) katrai asij ir viens ritenis. Pakāpju mehānismos katrai asij, izņemot piedziņas un piedziņas, ir divi riteņi. Attēlā 4. parādīta trīspakāpju mehānisma shēma. Viņam
|
|

Pārraidot rotāciju caur koniskiem riteņiem, pārnesuma zīmi nosaka bultu likums (2.5. att.). Ja bultiņas uz piedziņas un dzenošajiem riteņiem, kas atrodas uz paralēlām vārpstām, ir vērstas vienā virzienā, tad pārnesumskaitlis būs ar plus zīmi, ja pretējos virzienos, tad ar mīnusa zīmi.
|
|
|


Attēlā parādītajam mehānismam. 5.

Zobu mehānismus, kuriem ir riteņi, kuru asis kustas telpā, sauc par satelītiem (2.6.a att.). Riteņus 1 un 3, kas griežas ap fiksētu centrālo asi, sauc par centrālajiem, bet 2. riteni, kura ass kustas telpā, sauc par satelītu. Saite H, kurā ir fiksēta satelīta 2 ass, tiek saukta par nesēju.
|
|
|


Satelītu mehānismus ar divām vai vairākām brīvības pakāpēm sauc par diferenciāliem, un tos, kuriem ir viena brīvības pakāpe, sauc par planetārajiem.
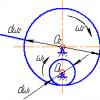
Sakarību starp saišu leņķiskajiem ātrumiem var noteikt, izmantojot kustības apgriešanas metodi. Tās būtība slēpjas faktā, ka visām mehānisma saitēm tiek dota papildu rotācija ar leņķisko ātrumu, kas vienāds ar nesēja griešanās leņķisko ātrumu, bet virzienā pretējs (-ω n). Tajā pašā laikā nesējs garīgi apstājas un diferenciāļa mehānisms pārvēršas reversā mehānismā, kurā visu riteņu asis ir nekustīgas. Apgrieztās kustības saišu jaunie leņķiskie ātrumi ir vienādi
Pārnesuma attiecībai no pirmās saites uz trešo apgrieztā mehānisma gadījumā ir tāda forma
Formulu (4) sauc par Vilisa formulu, kur noteiktam mehānismam saskaņā ar att. 6,a
Ņemot vērā divus ātrumus, trešā ātruma noteikšanai var izmantot formulu (4).
Ņemiet vērā, ka Vilisa formulu var uzrakstīt jebkurām divām saitēm. Piemēram, saskaņā ar formulu (5)
Tā kā ω3=0, tad
Dažos gadījumos ir ieteicams izmantot kombinētus pārnesumu mehānismus, kas sastāv no dažāda veida zobratiem. Piemēram, mehānisms, kas parādīts attēlā. 2.2, ir divas vienkāršas stadijas un viena planetārā stadija. Visa mehānisma pārnesumskaitlis

Tehnoloģijā tiek izmantoti satelīta mehānismi, kas sastāv no diferenciāļa, starp kura vadošajām saitēm ir uzstādīts starppārvads. Šī transmisija uzliek papildu sakabes nosacījumu, un diferenciālais mehānisms pārvēršas par sarežģītu planētu mehānismu ar vienu mobilitātes pakāpi. Šādu mehānismu sauc par slēgtu diferenciāli.
Uzdevumos zobratu transmisija no elektromotora uz pēdējo (izejas) riteni ietver gan vienkāršas transmisijas (ar fiksētām asīm), gan planetārās vai diferenciālās (ar kustīgām asīm). Lai aprēķinātu izejas saites apgriezienu skaitu, ir nepieciešams sadalīt visu transmisiju zonās: pirms diferenciāļa, diferenciāļa zonā un pēc diferenciāļa. Katrai zonai tiek noteikts pārnesumskaitlis. Zonām pirms diferenciāļa un pēc diferenciāļa pārnesuma attiecību nosaka pēc pārnesumu leņķisko ātrumu tiešās attiecības vai to zobu skaita apgrieztās attiecības. Skaitlis, kas izteikts kā zobu skaita attiecība, jāreizina ar (-1) m, kur m ir ārējo zobratu skaits. Pārnesumskaitli diferenciālajai zonai nosaka, izmantojot Vilisa formulu.
Kopējo pārnesumu attiecību definē kā visu zonu pārnesumu attiecību reizinājumu.
Dalot visa reduktora ieejas vārpstas apgriezienus ar kopējo pārnesumskaitli, iegūstam izejas saites apgriezienus.
Nākamais posms ir šīs pārraides kinemātiska izpēte, izmantojot grafisko metodi. Lai to izdarītu, lapas labajā pusē ir jāzīmē zobratu diagramma, sadalot to divās aptuveni vienādās daļās. Kreisajā pusē ir paredzēta zobratu konstrukcija.
Mehānisma diagramma ir uzzīmēta uz skalas, kas ir proporcionāla riteņu zobu skaitam, jo Riteņu diametri ir proporcionāli tiem. Diagrammas labajā pusē ir konstruēts zobrata mehānisma punktu lineāro ātrumu attēls, un zem tā ir leņķisko ātrumu attēls. Rezultātus, kas iegūti no leņķiskā ātruma modeļa, salīdzina ar analītiski iegūtajiem rezultātiem.
Apskatīsim piemēru.
Šajos uzdevumos ir jāspēj noteikt pārnesumu attiecības starp mehānisma saitēm.
Planētu mehānisma kinemātiskā analīze
1. Nosakiet mehānisma mobilitātes pakāpi:
Šajā mehānismā kustīgās saites ir 1, 2, 3, 4, H. Tāpēc apakšējie kinemātiskie pāri veido saites 1 ar statīvu, 2 ar nesēju H, ritenis 3 un statīvs veido divus apakšējos kinemātiskos pārus, saite 4 ar statīvu. Kopā Riteņu savienojumos veidojas Augstāki kinemātiskie pāri, t.i. punktos A, B, C un D. Kopā
2. No izlīdzināšanas stāvokļa atrodam nezināmo zobu skaitu, t.i. Un
3. Katrai planētu zonai uzrakstām Vilisa formulu. Zonai 1-2-3-Н:
1-4-3 zonai:
Ņemiet vērā, ka šī izteiksme tika iegūta no (2) vienādojuma. Aizstāsim iegūto vērtību vienādojumā (1):
![]()
![]()
Šī izteiksme apzīmē vēlamo pārnesumu attiecību
![]()
Grafiskā metode (14. attēls)
Grafiskā metode ir nepieciešama, lai pārbaudītu analītiskā aprēķina pareizību.
Visus mehānisma cilindrisko zobratu punktus novietojam uz polu līnijas. Turklāt mēs vienojamies, ka mēs ar gājieniem apzīmēsim tos mehānisma punktus, ātrumu
|

Punktu b projicējam uz 3. attēlu, pēc kura savienojam punktus b un , un iegūstam 2. attēlu, uz kura projicējam punktu. Tad savienojam punktu ar punktu O. Iegūstam attēlu H.
Pēc tam, iegūstot pola punktu m, mēs uzzīmējam patvaļīgu segmentu m-S. No punkta S velkam starus paralēli attēliem 1, 2, 3, 4, H. Līdz ar to iegūstam vektorus: , , , , . Vēlamo pārnesumu attiecību izsaka ar šādu attiecību: ![]() .
.
Zobratu sintēze (15. attēls).
Sākotnējo apļu rādiusi:
![]()
kur ir 4’ riteņa sākotnējā apļa rādiuss.
![]()
kur ir 3’ riteņa sākotnējā apļa rādiuss;
Galveno apļu rādiusi:
Soli pa sākotnējo apli:
Zobu izmēri: galvas augstums ![]()
kāju augstums
Galvas apļa rādiusi: 
Kāju apkārtmēra rādiusi: 
Zoba biezums un dobuma platums gar sākotnējo apli:
![]()
Attālums no centra:
Konstruējot zobratu, mēs atrodam pārklāšanās koeficientu

kur: - sasaistes loka garums;
Saderināšanās laukums;
Iesaistīšanās līnijas praktiskās daļas garums;
Sasaistes leņķis.

Pārklāšanās koeficienta vērtība jāsalīdzina ar analītiski noteikto vērtību:

Salīdzinājuma tabula
ĪPAŠI GALDI
Šajā rokasgrāmatā ir tabulas. 9.1-9.5 nevienmērīgi pārvietotiem zobratiem, sastādījis prof. V.N. Kudrjavcevs, un galds. 9.6. par nevienlīdzīgu pārnesumu, sastādījis TsKBR (Ātrumkārbu ražošanas Centrālais projektēšanas birojs).
Prof tabulas V.N. Kudrjavcevs satur koeficientu ξ 1 un ξ 2 vērtības, kuru summa ξ ir maksimālā iespējamā, ja tiek izpildītas iepriekš minētās pamatprasības.
Šajās tabulās sniegtie dati jāizmanto šādi:
1. Ja 2 ≥u 1,2 ≥ 1, tad tabulā vispirms. 9.2., ja ir dots Z 1, tiek atrasts koeficients ψ, tad 9.3. tabulā, ņemot vērā Z 1 un Z 2, tiek atrasti koeficienti ξ 1 un ξ 2. Koeficientus ξ C un α nosaka pēc formulām (skatīt zemāk). Sasaistes leņķi nosaka, izmantojot nomogrammu.
2. Ja 5 ≥u 1,2 ≥2, tad tabulā vispirms. 9.4, ņemot vērā Z 1, atrodiet koeficientus ψ un ξ 1. Tad tabulā. 9.5, ņemot vērā Z 1 un Z 2, atrodiet koeficientu ξ 2. Pēc tam rīkojieties, kā aprakstīts.
Tabula 9.6. satur pārvietojuma koeficientus vienādi nobīdītam zobratam.
Izvēloties šos koeficientus, papildus pamatprasībām tiek ievērota prasība, lai lielākās koeficientu vērtības λ 1 un λ 2 uz kājām būtu pietiekami mazas un arī vienādas viena ar otru. Lietojot tabulu. 9.6, jums jāatceras, ka ir jāizpilda nosacījums Z C ≥34.
Formulas ξ C un α noteikšanai:
ξ С = ξ 1 + ξ 2
ψ =ξ С - α.
9.1. tabula - Koeficientu vērtības nevienmērīgi pārvietotiem pārnesumiem pie 2 ≥u 1,2 ≥ 1
| Z 1 | |||||||
| 0.127 | 0.145 | 0.160 | 0.175 | 0.190 | 0.202 | 0.215 | |
| Z 1 | |||||||
| 0.227 | 0.239 | 0.250 | 0.257 | 0.265 | 0.272 | 0.276 |
9.2. tabula
| Z 1 | ||||||||||||||
| Z 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 |
| 0.390 | 0.395 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0.430 | 0.372 | 0.444 | 0.444 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0.464 | 0.354 | 0.479 | 0.423 | 0.486 | 0.486 | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0.513 | 0.341 | 0.515 | 0.400 | 0.524 | 0.462 | 0.525 | 0.425 | -- | -- | -- | -- | -- | -- | |
| 0.534 | 0.330 | 0.543 | 0.386 | 0.557 | 0.443 | 0.565 | 0.506 | 0.571 | 0.571 | -- | -- | -- | -- | |
| 0.551 | 0.322 | 0.566 | 0.376 | 0.588 | 0.426 | 0.600 | 0.485 | 0.609 | 0.547 | 0.608 | 0.608 | -- | -- | |
| 0.568 | 0.317 | 0.589 | 0.365 | 0.614 | 0.414 | 0.631 | 0.468 | 0.644 | 0.526 | 0.644 | 0.586 | 0.646 | 0.646 | |
| 0.584 | 0.312 | 0.609 | 0.358 | 0.636 | 0.405 | 0.661 | 0.452 | 0.677 | 0.508 | 0.678 | 0.566 | 0.683 | 0.624 | |
| 0.601 | 0.308 | 0.626 | 0.353 | 0.659 | 0.394 | 0.686 | 0.441 | 0.706 | 0.492 | 0.716 | 0.542 | 0.720 | 0.601 | |
| 0.617 | 0.303 | 0.646 | 0.345 | 0.676 | 0.389 | 0.706 | 0.433 | 0.731 | 0.481 | 0.744 | 0.528 | 0.756 | 0.580 | |
| 0.630 | 0.299 | 0.663 | 0.341 | 0.694 | 0.384 | 0.726 | 0.426 | 0.754 | 0.472 | 0.766 | 0.519 | 0.781 | 0.568 | |
| -- | 0.297 | 0.679 | 0.337 | 0.714 | 0.376 | 0.745 | 0.419 | 0.775 | 0.463 | 0.793 | 0.507 | 0.809 | 0.554 | |
| -- | -- | 0.693 | 0.334 | 0.730 | 0.372 | 0.763 | 0.414 | 0.792 | 0.458 | 0.815 | 0.497 | 0.833 | 0.543 | |
| -- | -- | 0.706 | 0.333 | 0.745 | 0.369 | 0.780 | 0.409 | 0.813 | 0.449 | 0.834 | 0.491 | 0.856 | 0.534 | |
| -- | -- | -- | -- | 0.758 | 0.368 | 0.796 | 0.405 | 0.830 | 0.445 | 0.854 | 0.483 | 0.878 | 0.525 | |
| -- | -- | -- | -- | 0.773 | 0.365 | 0.813 | 0.400 | 0.848 | 0.440 | 0.869 | 0.480 | 0.898 | 0.517 | |
| -- | -- | -- | -- | -- | -- | 0.826 | 0.399 | 0.862 | 0.438 | 0.892 | 0.470 | 0.916 | 0.511 | |
| -- | -- | -- | -- | -- | -- | 0.840 | 0.397 | 0.881 | 0.431 | 0.907 | 0.467 | 0.936 | 0.504 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 0.894 | 0.430 | 0.921 | 0.465 | 0.952 | 0.500 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 0.908 | 0.428 | 0.936 | 0.462 | 0.968 | 0.496 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 0.951 | 0.459 | 0.981 | 0.495 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 0.967 | 0.455 | 0.999 | 0.490 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,014 | 0.487 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,030 | 0.483 |
| Z 1 | ||||||||||||||
| Z 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 |
| 0,684 | 0,684 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,723 | 0,658 | 0,720 | 0,720 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,756 | 0,639 | 0,756 | 0,699 | 0,755 | 0,755 | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,792 | 0,617 | 0,793 | 0,676 | 0,793 | 0,731 | 0,782 | 0,782 | -- | -- | -- | -- | -- | -- | |
| 0,814 | 0,609 | 0,830 | 0,652 | 0,831 | 0,707 | 0,821 | 0,758 | 0,812 | 0,812 | -- | -- | -- | -- | |
| 0,849 | 0,588 | 0,860 | 0,636 | 0,866 | 0,686 | 0,861 | 0,732 | 0,850 | 0,787 | 0,839 | 0,839 | -- | -- | |
| Z 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 |
| 0,871 | 0,579 | 0,888 | 0,622 | 0,893 | 0,673 | 0,892 | 0,715 | 0,884 | 0,761 | 0,872 | 0,820 | 0,865 | 0,865 | |
| 0,898 | 0,566 | 0,915 | 0,609 | 0,926 | 0,654 | 0,925 | 0,696 | 0,924 | 0,742 | 0,913 | 0,793 | 0,898 | 0,845 | |
| 0,916 | 0,561 | 0,937 | 0,601 | 0,948 | 0,645 | 0,951 | 0,683 | 0,950 | 0,729 | 0,946 | 0,774 | 0,934 | 0,822 | |
| 0,937 | 0,552 | 0,959 | 0,592 | 0,976 | 0,632 | 0,976 | 0,672 | 0,984 | 0,708 | 0,979 | 0,755 | 0,966 | 0,804 | |
| 0,958 | 0,543 | 0,980 | 0,583 | 0,997 | 0,624 | 1,000 | 0,662 | 1,007 | 0,700 | 1,010 | 0,737 | 1,000 | 0,784 | |
| 0,976 | 0,537 | 0,997 | 0,578 | 1,018 | 0,615 | 1,023 | 0,651 | 1,031 | 0,689 | 1,038 | 0,723 | 1,033 | 0,764 |
Tabulas turpinājums. 9.2
| 0,994 | 0,532 | 1,017 | 0,571 | 1,038 | 0,608 | 1,045 | 0,641 | 1,051 | 0,678 | 1,055 | 0,718 | 1,060 | 0,750 | |
| 1,011 | 0,528 | 1,038 | 0,562 | 1,056 | 0,602 | 1,065 | 0,634 | 1,075 | 0,669 | 1,084 | 0,701 | 1,081 | 0,741 | |
| 1,026 | 0,525 | 1,054 | 0,559 | 1,076 | 0,594 | 1,082 | 0,629 | 1,094 | 0,662 | 1,101 | 0,696 | 1,105 | 0,730 | |
| 1,041 | 0,522 | 1,071 | 0,554 | 1,093 | 0,589 | 1,102 | 0,622 | 1,114 | 0,655 | 1,121 | 0,689 | 1,127 | 0,729 | |
| 1,059 | 0,516 | 1,088 | 0,550 | 1,110 | 0,584 | 1,122 | 0,614 | 1,131 | 0,650 | 1,145 | 0,678 | 1,149 | 0,719 | |
| 1,072 | 0,515 | 1,102 | 0,547 | 1,127 | 0,580 | 1,140 | 0,608 | 1,154 | 0,639 | 1,163 | 0,672 | 1,170 | 0,702 | |
| 1,088 | 0,511 | 1,117 | 0,545 | 1,141 | 0,578 | 1,157 | 0,603 | 1,172 | 0,634 | 1,180 | 0,667 | 1,188 | 0,696 | |
| -- | -- | 1,131 | 0,542 | 1,159 | 0,573 | 1,172 | 0,601 | 1,187 | 0,631 | 1,200 | 0,659 | 1,206 | 0,690 | |
| -- | -- | 1,145 | 0,540 | 1,173 | 0,570 | 1,186 | 0,599 | 1,204 | 0,626 | 1,218 | 0,653 | 1,223 | 0,685 | |
| -- | -- | -- | -- | 1,187 | 0,568 | 1,201 | 0,595 | 1,222 | 0,622 | 1,232 | 0,651 | 1,241 | 0,680 | |
| -- | -- | -- | -- | 1,201 | 0,567 | 1,218 | 0,591 | 1,233 | 0,621 | 1,249 | 0,647 | 1,260 | 0,673 | |
| -- | -- | -- | -- | -- | -- | 1,231 | 0,589 | 1,250 | 0,616 | 1,265 | 0,643 | 1,276 | 0,669 | |
| -- | -- | -- | -- | -- | -- | 1,247 | 0,586 | 1,266 | 0,612 | 1,279 | 0,640 | 1,291 | 0,665 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 1,279 | 0,611 | 1,295 | 0,636 | 1,306 | 0,662 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 1,293 | 0,609 | 1,310 | 0,634 | 1,321 | 0,659 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,325 | 0,631 | 1,336 | 0,657 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,338 | 0,629 | 1,350 | 0,654 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,365 | 0,651 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,379 | 0,649 |
9.3. tabula - Koeficientu ψ un ξ 1 vērtības nevienmērīgi nobīdītam ārējam zobratam pie 5 ≥u 1,2 ≥2
| Z 1 | |||||||||||
| ψ | 0,16 | 0,17 | 0,18 | 0,19 | 0,20 | 0,21 | 0,22 | 0,23 | 0,24 | 0,25 | 0,25 |
| ξ 1 | 0,66 | 0,73 | 0,80 | 0,96 | 0,92 | 0,98 | 1,04 | 1,10 | 1,16 | 1,22 | 1,27 |
9.4. tabula -
| Z 1 | Vērtības pie Z 1 | ||||||||||
| 0,442 | 0,425 | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,501 | 0,486 | 0,471 | 0,463 | -- | -- | -- | -- | -- | -- | -- | |
| 0,556 | 0,542 | 0,528 | 0,522 | 0,518 | 0,512 | 0,505 | -- | -- | -- | -- | |
| 0,610 | 0,596 | 0,582 | 0,577 | 0,575 | 0,569 | 0,564 | 0,560 | 0,553 | 0,606 | -- | |
| 0,661 | 0,648 | 0,635 | 0,632 | 0,628 | 0,624 | 0,620 | 0,616 | 0,611 | 0,662 | 0,566 | |
| 0,709 | 0,696 | 0,685 | 0,684 | 0,682 | 0,676 | 0,674 | 0,671 | 0,667 | 0,716 | 0,623 | |
| 0,754 | 0,745 | 0,734 | 0,732 | 0,731 | 0,728 | 0,727 | 0,722 | 0,720 | 0,769 | 0,677 | |
| -- | 0,789 | 0,782 | 0,780 | 0,779 | 0,778 | 0,777 | 0,773 | 0,772 | 0,820 | 0,729 | |
| -- | -- | 0,822 | 0,825 | 0,826 | 0,827 | 0,825 | 0,823 | 0,821 | 0,868 | 0,778 | |
| -- | -- | -- | 0,866 | 0,870 | 0,872 | 0,874 | 0,871 | 0,869 | 0,916 | 0,828 | |
| -- | -- | -- | -- | 0,909 | 0,914 | 0,917 | 0,920 | 0,919 | 0,965 | 0,876 | |
| -- | -- | -- | -- | -- | 0,954 | 0,957 | 0,961 | 0,962 | 1,008 | 0,924 | |
| -- | -- | -- | -- | -- | -- | 0,998 | 1,010 | 1,003 | 1,048 | 0,964 | |
| -- | -- | -- | -- | -- | -- | -- | 1,042 | 1,046 | 1,088 | 1,005 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 1,086 | 1,129 | 1,045 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,087 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,131 |
9.5. tabula - Koeficienta ξ 2 vērtības nevienmērīgi nobīdītam ārējam zobratam pie 5 ≥u 1,2 ≥2
| Vērtības pie Z 1 | ||||||||||||
| Z 1 | ||||||||||||
| -- | -- | -- | -- | -- | -- | 0,000 | -- | -- | -- | -- | -- | |
| -- | -- | -- | -- | -- | 0,060 | 0,032 | -- | -- | -- | -- | -- | |
| -- | -- | -- | -- | 0,124 | 0,094 | 0,060 | 0,030 | 0,000 | -- | -- | -- | |
| -- | -- | -- | 0,182 | 0,159 | 0,120 | 0,086 | 0,056 | 0,027 | 0,000 | -- | -- | |
| -- | -- | 0,241 | 0,220 | 0,181 | 0,144 | 0,110 | 0,080 | 0,052 | 0,025 | 0,000 | -- | |
| -- | 0,300 | 0,283 | 0,239 | 0,201 | 0,165 | 0,131 | 0,101 | 0,078 | 0,047 | 0,023 | 0,000 | |
| 0,358 | 0,343 | 0,299 | 0,256 | 0,219 | 0,183 | 0,149 | 0,119 | 0,092 | 0,067 | 0,043 | 0,021 | |
| 0,400 | 0,350 | 0,313 | 0,271 | 0,235 | 0,199 | 0,165 | 0,136 | 0,109 | 0,085 | 0,062 | 0,041 | |
| 0,400 | 0,350 | 0,326 | 0,285 | 0,248 | 0,213 | 0,180 | 0,151 | 0,125 | 0,101 | 0,079 | 0,058 | |
| 0,400 | 0,350 | 0,337 | 0,297 | 0,260 | 0,226 | 0,191 | 0,168 | 0,138 | 0,115 | 0,094 | 0,078 | |
| 0,400 | 0,350 | 0,347 | 0,308 | 0,271 | 0,238 | 0,205 | 0,178 | 0,152 | 0,128 | 0,107 | 0,087 | |
| 0,400 | 0,350 | 0,356 | 0,318 | 0,281 | 0,249 | 0,216 | 0,189 | 0,163 | 0,140 | 0,119 | 0,100 | |
| 0,400 | 0,350 | 0,364 | 0,327 | 0,291 | 0,258 | 0,226 | 0,199 | 0,173 | 0,150 | 0,130 | 0,111 |
Turpinājums no 9.5. tabulas
| 0,400 | 0,350 | 0,372 | 0,335 | 0,300 | 0,266 | 0,235 | 0,208 | 0,183 | 0,160 | 0,140 | 0,122 | |
| 0,400 | 0,350 | 0,379 | 0,343 | 0,308 | 0,274 | 0,243 | 0,216 | 0,192 | 0,170 | 0,150 | 0,132 | |
| 0,400 | 0,350 | 0,385 | 0,350 | 0,315 | 0,282 | 0,251 | 0,224 | 0,200 | 0,178 | 0,159 | 0,141 | |
| 0,400 | 0,350 | 0,390 | 0,363 | 0,329 | 0,296 | 0,265 | 0,236 | 0,215 | 0,194 | 0,175 | 0,158 | |
| 0,400 | 0,350 | 0,390 | 0,375 | 0,341 | 0,309 | 0,279 | 0,253 | 0,230 | 0,210 | 0,191 | 0,174 | |
| 0,400 | 0,350 | 0,390 | 0,385 | 0,353 | 0,322 | 0,293 | 0,266 | 0,246 | 0,226 | 0,207 | 0,190 | |
| 0,400 | 0,350 | 0,390 | 0,395 | 0,363 | 0,333 | 0,306 | 0,282 | 0,260 | 0,240 | 0,222 | 0,225 | |
| 0,400 | 0,350 | 0,390 | 0,409 | 0,378 | 0,350 | 0,325 | 0,301 | 0,280 | 0,260 | 0,242 | 0,235 | |
| 0,400 | 0,350 | 0,390 | 0,422 | 0,392 | 0,366 | 0,341 | 0,319 | 0,297 | 0,277 | 0,260 | 0,243 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,404 | 0,378 | 0,354 | 0,332 | 0,312 | 0,292 | 0,275 | 0,252 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,414 | 0,399 | 0,364 | 0,343 | 0,324 | 0,305 | 0,287 | 0,271 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,423 | 0,397 | 0,374 | 0,353 | 0,334 | 0,316 | 0,299 | 0,283 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,435 | 0,409 | 0,380 | 0,366 | 0,349 | 0,331 | 0,315 | 0,300 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,445 | 0,421 | 0,398 | 0,378 | 0,361 | 0,344 | 0,328 | 0,313 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,454 | 0,430 | 0,407 | 0,387 | 0,370 | 0,358 | 0,336 | 0,320 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,459 | 0,436 | 0,414 | 0,394 | 0,376 | 0,360 | 0,344 | 0,328 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,440 | 0,419 | 0,400 | 0,382 | 0,365 | 0,350 | 0,335 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,446 | 0,425 | 0,406 | 0,388 | 0,370 | 0,355 | 0,340 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,448 | 0,428 | 0,408 | 0,390 | 0,373 | 0,357 | 0,342 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,450 | 0,431 | 0,411 | 0,393 | 0,376 | 0,361 | 0,346 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,452 | 0,433 | 0,414 | 0,396 | 0,379 | 0,364 | 0,350 |
Pēc tam tiek noteikti zobratu galvenie parametri.

9.1.attēls- Ārējais zobrats
LIETOJUMI

Uzdevumi par vispārīgām mašīnbūves tēmām


| Saliekot mehānismus, piestipriniet | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkB 1 EkC | DkA 1 EkB | DkB 1 EkC | DkB 1 EkC | DkA 1 EkC | Pievienotā mehānisma zobratu zobu skaits | ||||||
| Galvenā mehānisma numurs | Z 1 | Z/1 | Z 2 | Z/2 | Z 3 | Z/3 | ||||||||||||||||
| Papildu (savienojuma) mehānisma skaits | ||||||||||||||||||||||
| - | ||||||||||||||||||||||
| - | ||||||||||||||||||||||
| - | ||||||||||||||||||||||
| Galvenā mehānisma zobu skaits | Z/1 | - | - | - | - | |||||||||||||||||
| Z 1 | - | |||||||||||||||||||||
| Z 2 | - | |||||||||||||||||||||
| Z 3 | - | - | - | - | - | - | ||||||||||||||||
| Z/3 | - | - | - | - | - | |||||||||||||||||
| Z 4 | - | - | ||||||||||||||||||||
| Z/4 | - | - | - | - | ||||||||||||||||||
| Z 5 | - | - | - | - | ||||||||||||||||||
| Z 6 | - | - |




Kontrolsaraksts
1. Mašīnu un tās galveno sekciju mehānika;
2. Mehānismu teorijas pamatjēdzieni un definīcijas;
3. Sviras mehānismi;
4. Izciļņu mehānismi;
5. Pārnesumu mehānismi;
6. Ķīļu un skrūvju mehānismi;
7. Berzes mehānismi;
8. Mehānismi ar elastīgām saitēm;
9.
10. Mehānismi ar elektriskām ierīcēm;
11. Kinemātiskie pāri un to klasifikācija;
12. Parastie kinemātisko pāru attēli;
13. Kinemātiskās ķēdes;
14. Vispārējas kinemātiskās ķēdes strukturālā formula;
15. Mehānisma kustības pakāpe;
16. Plakano mehānismu strukturālā formula;
17. Plakano mehānismu uzbūve;
18. Nomaiņas mehānismi;
19. Telpisko mehānismu uzbūve;
20. Mehānismu saimes;
21. Mehānismu veidošanas pamatprincips un to klasifikācijas sistēma;
22. Plakano mehānismu strukturālā klasifikācija;
23. Daža informācija par telpisko mehānismu strukturālo klasifikāciju;
24. Centroīdi absolūtā un relatīvā kustībā;
25. Mehānisma saišu ātruma attiecības;
26. Kinemātisko pāru saišu ātrumu un paātrinājumu noteikšana;
27. Tūlītēja paātrinājuma centrs un atskaņotājs;
28. Aptverošās un aptverošās līknes;
29. Centroid izliekums un savstarpēji aptverošas līknes;
30. Mehānisma pastāvīgā un sākotnējā kustība;
31. Grupas saišu pozīciju noteikšana un mehānisma saišu punktu aprakstīto trajektoriju konstruēšana;
32. 2. klases grupu ātrumu un paātrinājumu noteikšana;
33. 3. klases grupu ātrumu un paātrinājumu noteikšana;
34. Kinemātisko diagrammu konstruēšana;
35. Mehānismu kinemātiskā izpēte, izmantojot diagrammu metodi;
36. Četru stieņu eņģes mehānisms;
37. Kloķa-slīdņa mehānisms;
38. Šūpuļmehānismi;
39. Uzkrājumu definīcija;
40. Ātrumu un paātrinājumu noteikšana;
41. Kinemātiskās pamatattiecības;
42. Berzes pārnesumu mehānismi;
43. Trīssviru pārnesumu mehānismi;
44. Daudzsviru zobratu mehānismi ar fiksētām asīm;
45. Planētu pārnesumu mehānismi;
46. Dažu veidu pārnesumkārbu un pārnesumkārbu mehānismi;
47. Pārnesumu mehānismi ar elastīgām saitēm;
48. Universāla savienojuma mehānisms;
49. Dubultā kardānveida savienojuma mehānisms;
50. Telpiskais četrstieņu eņģes mehānisms;
51. Skrūvju mehānismi;
52. Piedziņas saites periodiskas un mainīgas kustības pārnesumu mehānismi;
53. Mehānismi ar hidrauliskām un pneimatiskām ierīcēm;
54. Galvenie mērķi;
55. Mehānismu jaudas aprēķināšanas problēmas;
56. Spēki, kas iedarbojas uz mehānisma saitēm;
57. Spēku, darbu un jaudu diagrammas;
58. Mašīnu mehāniskie parametri;
59. Berzes veidi;
60. Nesmērētu korpusu berzes slīdēšana;
61. Berze translācijas kinemātiskajā pārī;
62. Berze skrūvju kinemātiskajā pārī;
63. Berze rotācijas kinemātiskajā pārī;
Aprēķini šajā sadaļā tiks veikti saskaņā ar metodoloģiju, kas aprakstīta, pamatojoties uz šādiem sākotnējiem datiem:
Z 2 =57 - otrā riteņa zobu skaits
Z 3 =58 - trešā pārnesuma zobu skaits
Z 4 =20 - ceturtā pārnesuma zobu skaits
Z 5 =95 - piektā pārnesuma zobu skaits
Z 6 =22 - sestā zobrata zobu skaits
u 1 =2s -1 - pirmā pārnesuma leņķiskais ātrums
Apskatīsim šī pārnesuma mehānisma struktūru.
Noteiksim mehānisma soļu skaitu un norādīsim to raksturlielumus. Piektais un sestais ritenis veido visvienkāršāko soļu sēriju - plakanu pārnesumu mehānismu ar iekšējo zobratu. Otrais posms, kas sastāv no 1,2,3,4 pārnesumiem un sviras H - turētājs, ir planētu sērija ar divrindu satelītu ar diviem ārējiem pārnesumiem.
Kinemātiskās analīzes mērķis.
Kinemātiskās analīzes mērķis ir noteikt katra posma un visa mehānisma pārnesumskaitļus kopumā, kā arī atsevišķu norādīto saišu leņķiskos ātrumus.
Noteiksim zobu skaitu Z 1.
Noteiksim planētu mehānisma Z 1 trūkstošo zobu skaitu. Lai to izdarītu, mēs izmantojam centrālo saišu koaksialitātes nosacījumu. Norādīsim attālumu no centra līdz centram starp centrālo asi un satelītu rotācijas asi.
a=R 1 +R 2 - centrālās saites izlīdzināšanas nosacījums.
Z 1 = Z 3 + Z 4 - Z 2
Z 1 =58+20-57=21
Uzzīmēsim pārnesumu mehānisma diagrammu mērogā.
µz = 95/95 = 1 1/mm
Nosakīsim izmērus, izmantojot segmentu, ar kura palīdzību uz riteņa tiks attēloti zobrati.
L Z5 = Z k /µ z = 95/1 = 95 mm
Zobratu mehānisma kinemātiskā analīze grafiski.
Lai veiktu analīzi, izmantojot šo metodi, ir jāveic mehānisma kinemātiskā diagramma. Mēs sākam kinemātisko analīzi no ievades saites.
VA =у 1 *RA =21m/s
V V = 1 * R V =58 m/s
Izvēlēsimies skalu zobratu mehānisma lineāro ātrumu plāna sastādīšanai.
µ V = V A / (AO) = 21/21 = 1 (m/s)/mm
Ievades saitei mēs veidojam lineāro ātrumu plānu. Lai izveidotu plānu, pietiek zināt divu punktu ātrumu, jo atkarība ir lineāra. Mēs projicējam uz polu līnijas punktiem, kuru ātrumi ir zināmi. No punktu projekcijas uzzīmējam skalai perpendikulāras polu līnijas, norādīto punktu lineāro ātrumu vektorus. Mēs pārejam uz ievades saiti, sekojot ievades saitei. Otrajā saitē atrodam divus punktus, kuru ātrumi ir zināmi. Mēs projicējam šos punktus uz polu līnijas. Atrastajiem punktiem uzzīmējam zināmos lineāro ātrumu vektorus. Pamatojoties uz diviem zināmiem punktiem, mēs veidojam lineāro ātrumu plānu. Pamatojoties uz konstruēto lineāro ātrumu plānu, mēs uzzīmēsim saišu leņķisko ātrumu diagrammu. Caur punktu P velkam taisnas līnijas paralēli lineāro ātrumu sadalījuma likumiem lineārā ātruma plānā. Segmenti staru diagrammā ar sākumu punktā O un beigām atbilstošā skaitļa punktā attēlo saišu leņķiskos ātrumus, jo ir zināms ievades saites leņķiskais ātrums, skalas koeficients diagrammas konstruēšanai var būt noteikts.
µ u = u 1 / O 1 = 2/1 = 2
Zinot saišu leņķiskos ātrumus, mēs noteiksim katra mehānisma posma un visa mehānisma kopumā pārnesumu attiecības.
Zobratu mehānisma kinemātiskā analīze, izmantojot analītisko metodi.
Tā kā mehānisms sastāv no diviem posmiem, tā kopējo pārnesumu attiecību var definēt kā visu tā posmu pārnesumu attiecību reizinājumu. Pirmkārt, mēs nosakām vienkāršākā pārnesuma pakāpes pārnesuma attiecību.
i 56 = Z 6 / Z 5 = 22/95 = 0,23
Apskatīsim planētu pārnesumu komplektu. Planētu mehānisma kinemātiskās analīzes sarežģītība slēpjas faktā, ka satelīti veic sarežģītas kustības, un tāpēc tiem ir portatīvās kustības leņķiskais ātrums un relatīvais leņķiskais ātrums attiecībā pret nesēju. Lai atrisinātu problēmu, tiek izmantots pārvadātāja apturēšanas princips. Vilisa metodes pamatā ir nesēja apturēšanas princips, kura būtība ir šāda. Planētu mehānisms garīgi tiek aizstāts ar apgrieztu mehānismu.
Vispārējais mehānisms ir izveidots šādi:
1) pārvadātājs tiek uzskatīts par stacionāru,
2) tā kā nesējs ir nekustīgs, nesēja leņķiskais ātrums tiek atņemts no visu saišu leņķiskajiem ātrumiem,
3) katram pārnesumam varat uzrakstīt pārnesuma attiecību formulu zobu skaita izteiksmē,
4) ar matemātisku pārveidojumu palīdzību jūs varat pāriet no apgrieztā mehānisma uz planētu mehānismu - sākotnējo un noteikt planetārā mehānisma pārnesumu attiecības.
Taisām galdu. Tabulā būs trīs kolonnas: 1) detaļu skaits, kas veido planētu mehānismu, 2) saišu leņķiskie ātrumi normālā kustībā, 3) saites leņķiskie ātrumi, kad nesējs ir apturēts.
i 12 =(w 2 - w H)/(w 1 - w H) = -2,7
i34 =(n2-nH)/(-nH)=-0,34
w 2 = w 3 = 3,06
sch 1 H =2-2,28=-0,28
sch 2 H = 3,06-2,28 = 0,78
sch 3 H = 3,06-2,28 = 0,78
sch 4 H =0-2,28=-2,28
Ļaujiet mums noteikt visa mehānisma vispārējo pārnesumu attiecību
2.2. Pārnesumu mehānismu analīze
Lai noteiktu pārnesumu attiecību ar grafisku metodi, mēs attēlojam doto mehānismu mērogā, ņemot patvaļīgu moduļa vērtību (m = 10). Norādīsim visus mehānisma raksturīgos punktus - zobratu stabus un riteņu centrus. Mēs novelkam līniju, kas ir perpendikulāra riteņu griešanās asīm, un projicējam uz tās visus raksturīgos punktus. Tā kā vadošā saite ir ritenis 1, mēs attēlojam tā gala (punkta A) lineāro ātrumu ar patvaļīga garuma vektoru Aa. Savienojot punktus a un O 1, iegūstam riteņa 1 lineāro ātrumu sadalījuma līniju. Savienojam punktu B ar punktu a, un šīs līnijas turpinājumā projicējam punktu O 2, iegūstam lineāro sadalījuma līniju. riteņa 2. ātrumi. Savienojot punktus O 2, O 4 iegūstam lineāro riteņu ātrumu sadalījuma līniju 4. Taisnes Aa turpinājumā projicējam punktu A / . Mēs savienojam punktu a / ar punktu c, lai iegūtu 5. riteņa sadales līniju. Punktu O 5 projicējam uz šīs līnijas. Mēs savienojam punktu O 5 ar punktu O H, iegūstam sadales līniju gala saitei - nesējam.
Pārnesumu nosaka, izmantojot segmentus SH un S1
i 1Н = S 1 / S Н = 190/83 = 2,29
Tā kā segmenti SH un S1 atrodas vienā SP pusē, pārnesumskaitli iegūst ar plus zīmi.
Mums ir diferenciālais mehānisms

Di = × 100% = 3,9%
2.3 Planētu mehānisma izlīdzināšanas, tuvuma un montāžas nosacījumu izpildes pārbaude
Izlīdzināšanas nosacījums ir vienāds starp pārnesumu pāru centra un centra attālumiem
r 1 + r 2 = r 3 - r 2 vai z 1 + z 2 = z 3 - z 2
36 + 40 = 116 – 40 76 = 76
Izlīdzināšanas nosacījums ir izpildīts.
Apkārtnes stāvoklis nosaka iespēju novietot visus satelītus ap to centru apkārtmēru, nepieskaroties viens otram.
grēks 
kur K ir satelītu skaits
Pie K= 2 sin>0,28
Apkaimes stāvoklis ir apmierināts.
Montāžas nosacījums nosaka iespēju vienlaikus savienot visus satelītus ar centrālo riteni. Tas nozīmē, ka centrālo riteņu zobu skaitļu summa būs satelītu skaita reizinājums.
kur C ir jebkurš pozitīvs vesels skaitlis.
![]()
Montāžas nosacījums ir izpildīts.
Tādējādi noteiktā zobratu mehānisma planetārā daļa atbilst visām konstrukcijas prasībām.
3 Sviras mehānisma jaudas aprēķins
20. variants
Sākotnējie dati:
| LBC = 0,5 |
kur l i ir saišu garums un attālums līdz saišu masas centriem no to sākotnējām eņģēm, m;
J si – saišu inerces momenti, kgm 2;
m i – saišu masas, kg;
w 1 – piedziņas saites leņķiskais ātrums, s -1;
P nc - lietderīgais pretestības spēks, kas pielikts slīdnim 5, N;
P j 5 – 5. posma inerces spēks, N.
Līdzsvarošanas spēks jānosaka ar strukturālo grupu izolēšanas metodi un Ņ.E. Žukovska stingrās sviras metodi, spiediens visos kinemātiskajos pāros.
Uzzīmējiet mehānisma plānu mērogā m l
m l = l OA / OA = 0,2/40 = 0,005 m/mm.
Mēs veidojam ātruma plānu, kas pagriezts par 90° pēc mēroga
m v = V A /Pa = w 1 × l OA /Pa = 60 × 3,14 × 0,2/94,2 = 0,4 m/s/mm.
Punkta B ātrums tiks noteikts, atrisinot divus vektoru vienādojumus
V B = V A + V BA, V B = V C + V BC.
Punktu d ātruma plānā nosaka līdzības teorēma
BC/DC = Pb/Pd Pd = Pb × CD/BC = 64 × 40/100 = 25,6 mm. Lai noteiktu punkta E ātrumu, sastādam vektora vienādojumu V E = V D +V ED un atrisinām to. Mēs veidojam paātrinājuma plānu, pagrieztu par 180° pēc mēroga
m a = a A /pa=w 1 2 × l OA /pa = (60 × 3,14) 2 × 0,2/101,4 = 70 m / s 2 /mm.
Punkta B paātrinājumu nosaka attiecībā pret punktiem A un C
a B = a A + a n BA + a t BA , a B = a C + a n CB + a t CB ,
a n BA = w 2 2 × l AB = (ab × m v / l AB) 2 × l AB = (84 × 0,4/0,6) 2 × 0,6 = 1881,6 m/s 2
a n BC = w 3 2 × l BC = (Pb × m v / l BC) 2 × l BC = (64 × 0,4/0,5) 2 × 0,5 = 1310,7 m/s 2
Segmentu garumi, kas attēlo parastās paātrinājuma sastāvdaļas
a n BA un a n BC uz paātrinājuma plāna, kas noteikts, ņemot vērā mērogu m a
an BA = a n BA /m a = 1881,6/70 = 26,9 mm
pn BC = a n BC /m a = 1310,7/70 = 18,7 mm
Punkta d atrašanās vietu paātrinājuma plānā nosaka līdzības teorēma
BC/DC = πb/πd πd = πb × CD/BC = 58 × 40/100 = 23,4 mm. Lai noteiktu punkta E paātrinājumu, mēs sastādām un atrisinām vektora vienādojumu a E = a D +a n ED +a t ED. kur a n ED = w 4 2 × l ED = (V ED /l ED) 2 × l ED = (de × m v /l DE) 2 × l DE = (14 × 0,4) 2 / 0,7 = 44,8 m / s 2 /mm
Segmenta garums paātrinājuma plānā
dn ED = a n ED /m a = 44,8/70 = 0,64 mm
Punktu S 2, S 3, S 4 atrašanās vietu paātrinājuma plānā nosaka līdzības teorēma no sakarībām
AB/AS 2 = ab/aS 2 Þ aS 2 = ab × AS 2 /AB = 45 × 40/120 = 15 mm
BC/CS 3 = pb/pS 3 Þ pS 3 = pb × CS 3 /BC = 58 × 20/100 = 11,6 mm
DE/DS 4 = de/dS 4 Þ ds 4 = de × DS 4 /DE = 19 × 60/140 = 8,14 mm
Savienojumu inerces spēku noteikšana
Nosakot inerces spēkus un momentus, ņemam vērā, ka paātrinājuma plāns tiek konstruēts pagriezts par 180°, tāpēc aprēķinos izlaižam mīnusa zīmi.
P j2 = m 2 × a s2 = m 2 × ps 2 × m a = 60 × 86 × 70 = 361 200 N
M j2 = J s2 × e 2 = J s2 × a t BA /l AB = J s2 × n BA b × m a / l AB = 0,1 × 39 × 70/0,6 = 455 H × m
P j3 = m 3 × a s3 = m 3 × ps 3 × m a = 50 × 12 × 70 = 42 000 H
M j3 = J s3 × e 3 = J s3 × a t BA /l B C = J s3 × n B C b × m a / l B C = 0,06 × 55 × 70/0,5 = 462 H × m
P j4 = m 4 × a s4 = m 4 × ps 4 × m a = 50 × 21 × 70 = 73 500 H
M j4 = J s4 × e 4 = J s4 × a t ED /l DE = J s4 × n ED e × m a /l DE = 0,12 × 19 × 70/0,7 = 228 H × m
P j 5 = m 5 × a E = m 5 × pe × m a = 140 × 22 × 70 = 215 600 H
Noderīgs pretestības spēks, kas pielikts darba saitei (5)
P nc = -2 P j 5 = - 431200 H
Rezultants punktā E R 5 = P j 5 + P nc = -215600 H Aprēķinātos spēkus un momentus uzzīmējam mehānisma plānā. Punktos S 2 , S 3 , S 4 mēs pieliekam inerces spēkus, bet punktos A un E attiecīgi līdzsvarošanas spēku - P y un izrietošo spēku - R 5.
Pielikto spēku ietekmē mehānisms ir līdzsvarā. Mēs izvēlamies pirmo strukturālo grupu (saites 4,5) un apsveram tās līdzsvaru. Punktos D un E, lai līdzsvarotu strukturālo grupu, mēs izmantojam reakcijas R 34 un R 05.
Izveidosim līdzsvara vienādojumu
SM D = 0, P j4 × h 4 µ l + R 5 × h 5 µ l + R 05 × h 05 µ l - M j4 = 0
R 05 = (-P j4 × h 4 µ l - R 5 × h 5 µ l + M j4)/h 05 µ l = (-73500 × 2∙0,005- 215600 × 62∙0,005 + 228)/10,005 = -106893,6 N
SP i = 0. P j 4 + R 5 + R 05 + R 34 = 0. Mēs pieņemam spēku plāna mērogu
m p 1 = P j 4 / z j 4 = 73500/50 = 1470 N/mm
Šajā mērogā mēs veidojam spēka daudzstūri, no kura mēs atrodam
R 34 = z 34 × m p 1 = 112 × 1470 = 164 640 H
Mēs identificējam un apsveram otrās strukturālās grupas līdzsvaru (saites 2, 3). Lai to līdzsvarotu, mēs izmantojam:
punktā D – reakcija R 43 = - R 34;
punktā A - reakcija R 12;
punktā C – reakcija R03.
SM B2 = 0, P j 2 × h 2 µ l - R t 12 × AB × µ l + M j 2 = 0,
Rt 12 = (P j 2 × h 2 µl + M j 2)/AB × µ l = (361200 × 50∙0,005 + 455)/120 × 0,005 = 151258,3 H
SM B3 = 0, P j 3 × h 3 × µ l + R t 03 × BC × µ l + R 43 × h 43 × µ l - M j 3 = 0
Rt 03 = - P j 3 × h 3 × µ l - R 43 × h 43 × µ l + M j 3 / BC × µ l ,
Rt 03 = - 42000 × 76 × 0,005-164640 × 31 × 0,005 + 462/100 × 0,005 = - 82034,4 N SP i = 0, R t 12 + P j 2 + R 43 + P j 0 3 + R n 03 + R n 12 = 0 . Mēs pieņemam šīs struktūrgrupas spēku plāna mērogu
m p 2 = P j 2 / z j 2 = 361200/100 = 3612 N/mm
No spēku daudzstūra mēs nosakām iegūto reakciju
R 12 = R n 12 + R t 12 un tā vērtība
R 12 = z 12 × m p 2 = 79 × 3612 = 285 348 H
Mēs ņemam vērā atlikušā pirmās klases mehānisma līdzsvaru. Punktā O mēs aizstājam statīvu ar patvaļīga virziena reakciju R 01.
Līdzsvara vienādojumu sastādīšana
SM 0 = 0, P y × OA - R 21 × h 21 = 0.
Līdzsvarojošs spēks
P y = R 21 × h 21 /OA = 79935,9 H
SP i = 0, P y + R 21 + R 01 = 0.
Spēka plāna mērogs
m p 3 = R 21 /z 21 = 2850 N/mm
No spēka trīsstūra mēs atrodam reakciju R 01
R 01 = z 01 × m p 3 = 99 × 2850 = 282150 H
Mēs nosakām spiedienu kinemātiskajos pāros.
Kinemātiskais pāris B (saites 2,3). Aplūkojam saiknes līdzsvara vienādojumu R 12 + P j 2 + R 32 = 0. Lai to atrisinātu, izmantojam strukturālās grupas spēku plānu (2.3). Noslēguma vektors z 32 ir parādīts ar punktētu līniju.
R 32 = z 32 × m p 2 = 24 × 3612 = 86688 H Spiedienu kinemātiskajā pārī E (saites 4.5) nosaka no vektora vienādojuma risinājuma R 5 + R 05 + R 45 = 0 R 45 = z 45 ×m p 1 = 162 × 1470 = 238140 N Spiediena vērtības visos aplūkojamā mehānisma kinemātiskajos pāros apkopojam tabulā. 4. tabula - Spiediena vērtības mehānisma kinemātiskajos pāros
| kinemātiskā | 0 | A | IN | AR | D | ||
| Apzīmējums | |||||||
| Vērtība, N | 282150 | 285348 | 86688 | 122808 | 164640 | 238140 | 106893.6 |
Lai noteiktu līdzsvarošanas spēku, izmantojot Ņ.E. Žukovska metodi, mēs sastādam ātruma plānu, kas pagriezts par 90° samazinātā mērogā. Šajā zīmējumā šis ātruma plāns sakrīt ar mehānisma ātruma plānu. Izmantojot līdzības teorēmu, ātruma plānā nosaka punktu S 2, S 3, S 4 pozīcijas.
AS 2 /AB = ak 2 /ab Þ as 2 = ab × AS 2 /AB = 84 × 40/120 = 28 mm
CS 3 /CB = Ps 3 /Pb Þ Ps 3 = Pb × CS 3 /CB = 64 × 20/100 = 12,8 mm
DS 4 / DE = dk 4 / de Þ ds 4 = de × DS 4 / DE = 14 × 60/140 = 6 mm
1.4. Izejas saites nobīdes diagrammas uzbūve. Izvadsaites nobīdes diagramma iegūta segmentu konstruēšanas rezultātā, kas ņemti no plakansviras mehānisma rasējuma 12 pozīcijās, ņemot vērā mēroga koeficientu 1,5 Izejas posma ātruma diagrammas uzbūve. Izejas saites ātruma diagramma tiek iegūta grafiskās diferenciācijas rezultātā...
24 0,00 0,00 14,10 14,10 9,30 9,30 58,02 58,02 2,4 Mehānisma izpēte ar kinemātisko diagrammu metodi Mehānismu izpēte ar diagrammu metodi tiek veikta ar mērķi: 1. Iegūt kustības vizuālās attēlošanas likumu. mūs interesējošs punkts vai mehānisma saite. 2. Punktu vai saišu ātrumu un paātrinājumu noteikšana, pamatojoties uz zināmo punktu nobīdes likumu vai...