Zobniški mehanizmi služijo za prenos rotacijskega gibanja z ene gredi na drugo, za spreminjanje velikosti in smeri kotne hitrosti in navora.
Glede na relativni položaj gredi ločimo ploščate in prostorske zobnike. V ravnih mehanizmih so osi vrtenja členov vzporedne, vsi členi pa se vrtijo v vzporednih ravninah. V tem primeru se vrtenje prenaša s konstantnim prestavnim razmerjem z okroglimi cilindričnimi kolesi (slika 1).
|
|
|

Pri prostorskih zobnikih se vrtilne osi členov sekajo (stožčasti zobniki) ali križajo (polžasti, vijačni, spiroidni in hipoidni zobniki).
Obstajajo zunanji (slika 1.a), notranji (slika 1.b) in zobati zobniki.
Razmerje med kotno hitrostjo pogonske gredi j in kotno hitrostjo pogonske gredi k se imenuje prestavno razmerje in je označeno s črko "u" z ustreznimi indeksi:
Znak plus se nanaša na notranje zobnike, znak minus pa na zunanje zobnike. Za doseganje velikih prestavnih razmerij se uporabljajo bolj zapleteni večstopenjski prestavni mehanizmi.
Stopnja zobnika je prenos med dvema členoma, ki se nahajata na najbližjih fiksnih oseh. Število korakov v zobniških mehanizmih je enako številu fiksnih osi minus ena.
Koraki so preprosti in planetarni. Na sl. 2. A in C - enostavne, B - planetarne stopnje. Če je hitrost vrtenja gnane gredi manjša od hitrosti vrtenja pogonske gredi, se tak mehanizem imenuje menjalnik.
Zobniški mehanizmi s kolesnimi osmi, ki so glede na stojalo nepremični, so razdeljeni na navadne in stopničaste. Pri običajnih mehanizmih (slika 3) ima vsaka os eno kolo. V stopenjskih mehanizmih ima vsaka os, razen pogonske in gnane, dve kolesi. Na sl. 4. prikazuje diagram tristopenjskega mehanizma. Zanj
|
|

Pri prenosu vrtenja skozi poševna kolesa je znak prestavnega razmerja določen s pravilom puščic (slika 2.5). Če so puščice na pogonskih in gnanih kolesih, ki se nahajajo na vzporednih gredeh, usmerjene v isto smer, bo prestavno razmerje z znakom plus, če v nasprotnih smereh, potem z znakom minus.
|
|
|


Za mehanizem, prikazan na sl. 5.

Zobniški mehanizmi, ki imajo kolesa, katerih osi se premikajo v prostoru, se imenujejo sateliti (slika 2.6a). Kolesi 1 in 3, ki se vrtita okoli fiksne osrednje osi, se imenujeta osrednja, kolo 2, katerega os se premika v prostoru, pa satelit. Link H, v katerem je fiksna os satelita 2, se imenuje nosilec.
|
|
|


Satelitski mehanizmi z dvema ali več prostostnimi stopnjami se imenujejo diferencialni, tisti z eno prostostno stopnjo pa planetarni.
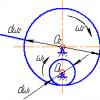
Razmerje med kotnimi hitrostmi členov lahko določimo z metodo obračanja gibanja. Njegovo bistvo je v tem, da se vse povezave mehanizma dodatno vrtijo s kotno hitrostjo, ki je po velikosti enaka kotni hitrosti vrtenja nosilca, vendar v nasprotni smeri (-ω n). Hkrati se nosilec mentalno ustavi in diferencialni mehanizem se spremeni v vzvratni mehanizem, v katerem so osi vseh koles nepremične. Novi kotni hitrosti členov pri vzvratnem gibanju sta enaki
Prestavno razmerje od prvega členka do tretjega za obrnjeni mehanizem ima obliko
Formula (4) se imenuje Willisova formula, kjer je za določen mehanizem po sl. 6,a
Glede na dve hitrosti lahko formulo (4) uporabimo za določitev tretje hitrosti.
Upoštevajte, da lahko Willisovo formulo napišete za kateri koli dve povezavi. Na primer, po formuli (5)
Ker je ω3=0, potem
V nekaterih primerih je priporočljivo uporabiti kombinirane zobniške mehanizme, sestavljene iz zobnikov različnih vrst. Na primer, mehanizem, prikazan na sl. 2.2, ima dve enostavni stopnji in eno planetarno stopnjo. Prestavno razmerje celotnega mehanizma

V tehnologiji se uporabljajo satelitski mehanizmi, sestavljeni iz diferenciala, med vodilnimi členi katerega je nameščen vmesni zobnik. Ta prenos nalaga dodaten pogoj sklopitve, diferencialni mehanizem pa se spremeni v kompleksen planetni mehanizem z eno stopnjo mobilnosti. Takšen mehanizem se imenuje zaprt diferencial.
V nalogah zobniški prenos od elektromotorja do zadnjega (izhodnega) kolesa vključuje tako enostavne prenose (s fiksnimi osemi) kot planetne ali diferencialne (s gibljivimi osemi). Za izračun števila vrtljajev izhodne povezave je treba celoten prenos razdeliti na cone: pred diferencialom, diferencialno cono in za diferencialom. Za vsako cono je določeno prestavno razmerje. Za cone pred diferencialom in za diferencialom je prestavno razmerje določeno z neposrednim razmerjem kotnih hitrosti zobnikov ali obratnim razmerjem njihovih zobnih števil. Število, izraženo kot razmerje med številom zob, je treba pomnožiti z (-1) m, kjer je m število zunanjih zobnikov. Prestavno razmerje za območje diferenciala se določi z uporabo Willisove formule.
Skupno prestavno razmerje je definirano kot produkt prestavnih razmerij vseh con.
Če vrtljaje vhodne gredi celotnega zobnika delimo s skupnim prestavnim razmerjem, dobimo vrtljaje izhodne povezave.
Naslednja faza je kinematična študija tega prenosa z grafično metodo. Če želite to narediti, morate narisati diagram zobnika na desni strani lista, potem ko ga razdelite na dva približno enaka dela. Na levi strani je predvidena konstrukcija zobnikov.
Diagram mehanizma je narisan v merilu, sorazmernem s številom zob kolesa, ker Premeri koles so jim sorazmerni. Desno od diagrama je sestavljena slika linearnih hitrosti točk zobniškega mehanizma, pod njo pa slika kotnih hitrosti. Rezultati, dobljeni iz vzorca kotne hitrosti, se primerjajo z rezultati, dobljenimi analitično.
Poglejmo si primer.
Pri teh nalogah je treba znati določiti prestavna razmerja med členi mehanizma.
Kinematična analiza planetarnega mehanizma
1. Določite stopnjo mobilnosti mehanizma:
Pri tem mehanizmu so gibljivi členi 1, 2, 3, 4, H. Zato spodnji kinematični pari tvorijo členke 1 s stojalom, 2 z nosilcem H, kolo 3 in stojalo tvorita dva spodnja kinematska para, člen 4. s stojalom. Skupaj Višji kinematični pari se oblikujejo v kolesnih prijemih, tj. v točkah A, B, C in D. Skupaj
2. Iz pogoja poravnave najdemo neznano število zob, tj. in
3. Za vsako planetarno cono zapišemo Willisovo formulo. Za cono 1-2-3-Н:
Za območje 1-4-3:
Upoštevajte, da je bil ta izraz dobljen iz enačbe (2). Zamenjajmo dobljeno vrednost v enačbo (1):
![]()
![]()
Ta izraz predstavlja želeno prestavno razmerje
![]()
Grafična metoda (slika 14)
Grafična metoda je potrebna za preverjanje pravilnosti analitičnega izračuna.
Vse točke cilindričnih zobnikov mehanizma postavimo na polico. Poleg tega se strinjamo, da bomo s potezami označili tiste točke mehanizma, hitrost
|

Točko b projiciramo na sliko 3, nakar povežemo točki b in , in dobimo sliko 2, na katero projiciramo točko. Nato točko povežemo s točko O. Dobimo sliko H.
Nato, ko dobimo polno točko m, narišemo poljuben segment m-S. Iz točke S potegnemo žarke, vzporedne s slikami 1, 2, 3, 4, H. Posledično dobimo vektorje: , , , , . Želeno prestavno razmerje je izraženo z naslednjim razmerjem: ![]() .
.
Sinteza zobnikov (slika 15).
Polmeri začetnih krogov:
![]()
kjer je polmer začetnega kroga 4' kolesa.
![]()
kjer je polmer začetnega kroga 3' kolesa;
Polmeri glavnih krogov:
Stopite po začetnem krogu:
Mere zoba: višina glave ![]()
višina noge
Polmeri kroga glave: 
Polmeri obsega noge: 
Debelina zoba in širina votline vzdolž začetnega kroga:
![]()
Sredinska razdalja:
Po konstruiranju zobnika najdemo koeficient prekrivanja

kjer je: - dolžina vpetega loka;
Zaroka;
Dolžina praktičnega dela zaročne črte;
Vpadni kot.

Vrednost koeficienta prekrivanja je treba primerjati z njegovo analitično določeno vrednostjo:

Primerjalna tabela
POSEBNE MIZE
Ta priročnik vsebuje tabele. 9.1-9.5 za neenakomerno zamaknjene zobnike, sestavil prof. V.N. Kudrjavcev in tabela. 9.6 za neenakomerno prestavljanje, ki ga je sestavil TsKBR (Centralni oblikovalski biro za proizvodnjo menjalnikov).
mize prof V.N. Kudryavtsev vsebujejo vrednosti koeficientov ξ 1 in ξ 2, katerih vsota ξ je največja možna, če so izpolnjene osnovne zahteve, navedene zgoraj.
Podatke v teh tabelah je treba uporabiti na naslednji način:
1. Če je 2 ≥u 1,2 ≥ 1, potem prvi v tabeli. 9.2, glede na Z 1, najdemo koeficient ψ Nato v tabeli 9.3, glede na Z 1 in Z 2, najdemo koeficienta ξ 1 in ξ 2. Koeficienti ξ C in α so določeni s formulami (glej spodaj). Zajemni kot se določi z nomogramom.
2. Če je 5 ≥u 1,2 ≥2, potem prvi v tabeli. 9.4, glede na Z 1, poiščite koeficienta ψ in ξ 1. Nato v tabeli. 9.5, glede na Z 1 in Z 2, poiščite koeficient ξ 2. Nato nadaljujte, kot je opisano.
Tabela 9.6 vsebuje koeficiente pomika za enako zamaknjeno prestavo.
Pri izbiri teh koeficientov je poleg osnovnih zahtev izpolnjena zahteva, da so največje vrednosti koeficientov λ 1 in λ 2 na krakih dovolj majhne in tudi enake med seboj. Pri uporabi tabele. 9.6, morate zapomniti, da mora biti izpolnjen pogoj Z C ≥34.
Formule za določanje ξ C in α:
ξ С = ξ 1 + ξ 2
ψ =ξ С - α.
Tabela 9.1 - Vrednosti koeficienta za neenakomerno zamaknjeno prestavo pri 2 ≥u 1,2 ≥ 1
| Z 1 | |||||||
| 0.127 | 0.145 | 0.160 | 0.175 | 0.190 | 0.202 | 0.215 | |
| Z 1 | |||||||
| 0.227 | 0.239 | 0.250 | 0.257 | 0.265 | 0.272 | 0.276 |
Tabela 9.2
| Z 1 | ||||||||||||||
| Z 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 |
| 0.390 | 0.395 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0.430 | 0.372 | 0.444 | 0.444 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0.464 | 0.354 | 0.479 | 0.423 | 0.486 | 0.486 | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0.513 | 0.341 | 0.515 | 0.400 | 0.524 | 0.462 | 0.525 | 0.425 | -- | -- | -- | -- | -- | -- | |
| 0.534 | 0.330 | 0.543 | 0.386 | 0.557 | 0.443 | 0.565 | 0.506 | 0.571 | 0.571 | -- | -- | -- | -- | |
| 0.551 | 0.322 | 0.566 | 0.376 | 0.588 | 0.426 | 0.600 | 0.485 | 0.609 | 0.547 | 0.608 | 0.608 | -- | -- | |
| 0.568 | 0.317 | 0.589 | 0.365 | 0.614 | 0.414 | 0.631 | 0.468 | 0.644 | 0.526 | 0.644 | 0.586 | 0.646 | 0.646 | |
| 0.584 | 0.312 | 0.609 | 0.358 | 0.636 | 0.405 | 0.661 | 0.452 | 0.677 | 0.508 | 0.678 | 0.566 | 0.683 | 0.624 | |
| 0.601 | 0.308 | 0.626 | 0.353 | 0.659 | 0.394 | 0.686 | 0.441 | 0.706 | 0.492 | 0.716 | 0.542 | 0.720 | 0.601 | |
| 0.617 | 0.303 | 0.646 | 0.345 | 0.676 | 0.389 | 0.706 | 0.433 | 0.731 | 0.481 | 0.744 | 0.528 | 0.756 | 0.580 | |
| 0.630 | 0.299 | 0.663 | 0.341 | 0.694 | 0.384 | 0.726 | 0.426 | 0.754 | 0.472 | 0.766 | 0.519 | 0.781 | 0.568 | |
| -- | 0.297 | 0.679 | 0.337 | 0.714 | 0.376 | 0.745 | 0.419 | 0.775 | 0.463 | 0.793 | 0.507 | 0.809 | 0.554 | |
| -- | -- | 0.693 | 0.334 | 0.730 | 0.372 | 0.763 | 0.414 | 0.792 | 0.458 | 0.815 | 0.497 | 0.833 | 0.543 | |
| -- | -- | 0.706 | 0.333 | 0.745 | 0.369 | 0.780 | 0.409 | 0.813 | 0.449 | 0.834 | 0.491 | 0.856 | 0.534 | |
| -- | -- | -- | -- | 0.758 | 0.368 | 0.796 | 0.405 | 0.830 | 0.445 | 0.854 | 0.483 | 0.878 | 0.525 | |
| -- | -- | -- | -- | 0.773 | 0.365 | 0.813 | 0.400 | 0.848 | 0.440 | 0.869 | 0.480 | 0.898 | 0.517 | |
| -- | -- | -- | -- | -- | -- | 0.826 | 0.399 | 0.862 | 0.438 | 0.892 | 0.470 | 0.916 | 0.511 | |
| -- | -- | -- | -- | -- | -- | 0.840 | 0.397 | 0.881 | 0.431 | 0.907 | 0.467 | 0.936 | 0.504 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 0.894 | 0.430 | 0.921 | 0.465 | 0.952 | 0.500 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 0.908 | 0.428 | 0.936 | 0.462 | 0.968 | 0.496 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 0.951 | 0.459 | 0.981 | 0.495 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 0.967 | 0.455 | 0.999 | 0.490 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,014 | 0.487 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,030 | 0.483 |
| Z 1 | ||||||||||||||
| Z 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 |
| 0,684 | 0,684 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,723 | 0,658 | 0,720 | 0,720 | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,756 | 0,639 | 0,756 | 0,699 | 0,755 | 0,755 | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,792 | 0,617 | 0,793 | 0,676 | 0,793 | 0,731 | 0,782 | 0,782 | -- | -- | -- | -- | -- | -- | |
| 0,814 | 0,609 | 0,830 | 0,652 | 0,831 | 0,707 | 0,821 | 0,758 | 0,812 | 0,812 | -- | -- | -- | -- | |
| 0,849 | 0,588 | 0,860 | 0,636 | 0,866 | 0,686 | 0,861 | 0,732 | 0,850 | 0,787 | 0,839 | 0,839 | -- | -- | |
| Z 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 | ξ 1 | ξ 2 |
| 0,871 | 0,579 | 0,888 | 0,622 | 0,893 | 0,673 | 0,892 | 0,715 | 0,884 | 0,761 | 0,872 | 0,820 | 0,865 | 0,865 | |
| 0,898 | 0,566 | 0,915 | 0,609 | 0,926 | 0,654 | 0,925 | 0,696 | 0,924 | 0,742 | 0,913 | 0,793 | 0,898 | 0,845 | |
| 0,916 | 0,561 | 0,937 | 0,601 | 0,948 | 0,645 | 0,951 | 0,683 | 0,950 | 0,729 | 0,946 | 0,774 | 0,934 | 0,822 | |
| 0,937 | 0,552 | 0,959 | 0,592 | 0,976 | 0,632 | 0,976 | 0,672 | 0,984 | 0,708 | 0,979 | 0,755 | 0,966 | 0,804 | |
| 0,958 | 0,543 | 0,980 | 0,583 | 0,997 | 0,624 | 1,000 | 0,662 | 1,007 | 0,700 | 1,010 | 0,737 | 1,000 | 0,784 | |
| 0,976 | 0,537 | 0,997 | 0,578 | 1,018 | 0,615 | 1,023 | 0,651 | 1,031 | 0,689 | 1,038 | 0,723 | 1,033 | 0,764 |
Nadaljevanje tabele. 9.2
| 0,994 | 0,532 | 1,017 | 0,571 | 1,038 | 0,608 | 1,045 | 0,641 | 1,051 | 0,678 | 1,055 | 0,718 | 1,060 | 0,750 | |
| 1,011 | 0,528 | 1,038 | 0,562 | 1,056 | 0,602 | 1,065 | 0,634 | 1,075 | 0,669 | 1,084 | 0,701 | 1,081 | 0,741 | |
| 1,026 | 0,525 | 1,054 | 0,559 | 1,076 | 0,594 | 1,082 | 0,629 | 1,094 | 0,662 | 1,101 | 0,696 | 1,105 | 0,730 | |
| 1,041 | 0,522 | 1,071 | 0,554 | 1,093 | 0,589 | 1,102 | 0,622 | 1,114 | 0,655 | 1,121 | 0,689 | 1,127 | 0,729 | |
| 1,059 | 0,516 | 1,088 | 0,550 | 1,110 | 0,584 | 1,122 | 0,614 | 1,131 | 0,650 | 1,145 | 0,678 | 1,149 | 0,719 | |
| 1,072 | 0,515 | 1,102 | 0,547 | 1,127 | 0,580 | 1,140 | 0,608 | 1,154 | 0,639 | 1,163 | 0,672 | 1,170 | 0,702 | |
| 1,088 | 0,511 | 1,117 | 0,545 | 1,141 | 0,578 | 1,157 | 0,603 | 1,172 | 0,634 | 1,180 | 0,667 | 1,188 | 0,696 | |
| -- | -- | 1,131 | 0,542 | 1,159 | 0,573 | 1,172 | 0,601 | 1,187 | 0,631 | 1,200 | 0,659 | 1,206 | 0,690 | |
| -- | -- | 1,145 | 0,540 | 1,173 | 0,570 | 1,186 | 0,599 | 1,204 | 0,626 | 1,218 | 0,653 | 1,223 | 0,685 | |
| -- | -- | -- | -- | 1,187 | 0,568 | 1,201 | 0,595 | 1,222 | 0,622 | 1,232 | 0,651 | 1,241 | 0,680 | |
| -- | -- | -- | -- | 1,201 | 0,567 | 1,218 | 0,591 | 1,233 | 0,621 | 1,249 | 0,647 | 1,260 | 0,673 | |
| -- | -- | -- | -- | -- | -- | 1,231 | 0,589 | 1,250 | 0,616 | 1,265 | 0,643 | 1,276 | 0,669 | |
| -- | -- | -- | -- | -- | -- | 1,247 | 0,586 | 1,266 | 0,612 | 1,279 | 0,640 | 1,291 | 0,665 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 1,279 | 0,611 | 1,295 | 0,636 | 1,306 | 0,662 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 1,293 | 0,609 | 1,310 | 0,634 | 1,321 | 0,659 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,325 | 0,631 | 1,336 | 0,657 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,338 | 0,629 | 1,350 | 0,654 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,365 | 0,651 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,379 | 0,649 |
Tabela 9.3 - Vrednosti koeficientov ψ in ξ 1 za neenakomerno premaknjeno zunanje gonilo pri 5 ≥u 1,2 ≥2
| Z 1 | |||||||||||
| ψ | 0,16 | 0,17 | 0,18 | 0,19 | 0,20 | 0,21 | 0,22 | 0,23 | 0,24 | 0,25 | 0,25 |
| ξ 1 | 0,66 | 0,73 | 0,80 | 0,96 | 0,92 | 0,98 | 1,04 | 1,10 | 1,16 | 1,22 | 1,27 |
Tabela 9.4 -
| Z 1 | Vrednosti pri Z 1 | ||||||||||
| 0,442 | 0,425 | -- | -- | -- | -- | -- | -- | -- | -- | -- | |
| 0,501 | 0,486 | 0,471 | 0,463 | -- | -- | -- | -- | -- | -- | -- | |
| 0,556 | 0,542 | 0,528 | 0,522 | 0,518 | 0,512 | 0,505 | -- | -- | -- | -- | |
| 0,610 | 0,596 | 0,582 | 0,577 | 0,575 | 0,569 | 0,564 | 0,560 | 0,553 | 0,606 | -- | |
| 0,661 | 0,648 | 0,635 | 0,632 | 0,628 | 0,624 | 0,620 | 0,616 | 0,611 | 0,662 | 0,566 | |
| 0,709 | 0,696 | 0,685 | 0,684 | 0,682 | 0,676 | 0,674 | 0,671 | 0,667 | 0,716 | 0,623 | |
| 0,754 | 0,745 | 0,734 | 0,732 | 0,731 | 0,728 | 0,727 | 0,722 | 0,720 | 0,769 | 0,677 | |
| -- | 0,789 | 0,782 | 0,780 | 0,779 | 0,778 | 0,777 | 0,773 | 0,772 | 0,820 | 0,729 | |
| -- | -- | 0,822 | 0,825 | 0,826 | 0,827 | 0,825 | 0,823 | 0,821 | 0,868 | 0,778 | |
| -- | -- | -- | 0,866 | 0,870 | 0,872 | 0,874 | 0,871 | 0,869 | 0,916 | 0,828 | |
| -- | -- | -- | -- | 0,909 | 0,914 | 0,917 | 0,920 | 0,919 | 0,965 | 0,876 | |
| -- | -- | -- | -- | -- | 0,954 | 0,957 | 0,961 | 0,962 | 1,008 | 0,924 | |
| -- | -- | -- | -- | -- | -- | 0,998 | 1,010 | 1,003 | 1,048 | 0,964 | |
| -- | -- | -- | -- | -- | -- | -- | 1,042 | 1,046 | 1,088 | 1,005 | |
| -- | -- | -- | -- | -- | -- | -- | -- | 1,086 | 1,129 | 1,045 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,087 | |
| -- | -- | -- | -- | -- | -- | -- | -- | -- | -- | 1,131 |
Tabela 9.5 - Vrednosti koeficienta ξ 2 za neenakomerno premaknjeno zunanje gonilo pri 5 ≥u 1,2 ≥2
| Vrednosti pri Z 1 | ||||||||||||
| Z 1 | ||||||||||||
| -- | -- | -- | -- | -- | -- | 0,000 | -- | -- | -- | -- | -- | |
| -- | -- | -- | -- | -- | 0,060 | 0,032 | -- | -- | -- | -- | -- | |
| -- | -- | -- | -- | 0,124 | 0,094 | 0,060 | 0,030 | 0,000 | -- | -- | -- | |
| -- | -- | -- | 0,182 | 0,159 | 0,120 | 0,086 | 0,056 | 0,027 | 0,000 | -- | -- | |
| -- | -- | 0,241 | 0,220 | 0,181 | 0,144 | 0,110 | 0,080 | 0,052 | 0,025 | 0,000 | -- | |
| -- | 0,300 | 0,283 | 0,239 | 0,201 | 0,165 | 0,131 | 0,101 | 0,078 | 0,047 | 0,023 | 0,000 | |
| 0,358 | 0,343 | 0,299 | 0,256 | 0,219 | 0,183 | 0,149 | 0,119 | 0,092 | 0,067 | 0,043 | 0,021 | |
| 0,400 | 0,350 | 0,313 | 0,271 | 0,235 | 0,199 | 0,165 | 0,136 | 0,109 | 0,085 | 0,062 | 0,041 | |
| 0,400 | 0,350 | 0,326 | 0,285 | 0,248 | 0,213 | 0,180 | 0,151 | 0,125 | 0,101 | 0,079 | 0,058 | |
| 0,400 | 0,350 | 0,337 | 0,297 | 0,260 | 0,226 | 0,191 | 0,168 | 0,138 | 0,115 | 0,094 | 0,078 | |
| 0,400 | 0,350 | 0,347 | 0,308 | 0,271 | 0,238 | 0,205 | 0,178 | 0,152 | 0,128 | 0,107 | 0,087 | |
| 0,400 | 0,350 | 0,356 | 0,318 | 0,281 | 0,249 | 0,216 | 0,189 | 0,163 | 0,140 | 0,119 | 0,100 | |
| 0,400 | 0,350 | 0,364 | 0,327 | 0,291 | 0,258 | 0,226 | 0,199 | 0,173 | 0,150 | 0,130 | 0,111 |
Nadaljevanje tabele 9.5
| 0,400 | 0,350 | 0,372 | 0,335 | 0,300 | 0,266 | 0,235 | 0,208 | 0,183 | 0,160 | 0,140 | 0,122 | |
| 0,400 | 0,350 | 0,379 | 0,343 | 0,308 | 0,274 | 0,243 | 0,216 | 0,192 | 0,170 | 0,150 | 0,132 | |
| 0,400 | 0,350 | 0,385 | 0,350 | 0,315 | 0,282 | 0,251 | 0,224 | 0,200 | 0,178 | 0,159 | 0,141 | |
| 0,400 | 0,350 | 0,390 | 0,363 | 0,329 | 0,296 | 0,265 | 0,236 | 0,215 | 0,194 | 0,175 | 0,158 | |
| 0,400 | 0,350 | 0,390 | 0,375 | 0,341 | 0,309 | 0,279 | 0,253 | 0,230 | 0,210 | 0,191 | 0,174 | |
| 0,400 | 0,350 | 0,390 | 0,385 | 0,353 | 0,322 | 0,293 | 0,266 | 0,246 | 0,226 | 0,207 | 0,190 | |
| 0,400 | 0,350 | 0,390 | 0,395 | 0,363 | 0,333 | 0,306 | 0,282 | 0,260 | 0,240 | 0,222 | 0,225 | |
| 0,400 | 0,350 | 0,390 | 0,409 | 0,378 | 0,350 | 0,325 | 0,301 | 0,280 | 0,260 | 0,242 | 0,235 | |
| 0,400 | 0,350 | 0,390 | 0,422 | 0,392 | 0,366 | 0,341 | 0,319 | 0,297 | 0,277 | 0,260 | 0,243 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,404 | 0,378 | 0,354 | 0,332 | 0,312 | 0,292 | 0,275 | 0,252 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,414 | 0,399 | 0,364 | 0,343 | 0,324 | 0,305 | 0,287 | 0,271 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,423 | 0,397 | 0,374 | 0,353 | 0,334 | 0,316 | 0,299 | 0,283 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,435 | 0,409 | 0,380 | 0,366 | 0,349 | 0,331 | 0,315 | 0,300 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,445 | 0,421 | 0,398 | 0,378 | 0,361 | 0,344 | 0,328 | 0,313 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,454 | 0,430 | 0,407 | 0,387 | 0,370 | 0,358 | 0,336 | 0,320 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,459 | 0,436 | 0,414 | 0,394 | 0,376 | 0,360 | 0,344 | 0,328 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,440 | 0,419 | 0,400 | 0,382 | 0,365 | 0,350 | 0,335 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,446 | 0,425 | 0,406 | 0,388 | 0,370 | 0,355 | 0,340 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,448 | 0,428 | 0,408 | 0,390 | 0,373 | 0,357 | 0,342 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,450 | 0,431 | 0,411 | 0,393 | 0,376 | 0,361 | 0,346 | |
| 0,400 | 0,350 | 0,390 | 0,430 | 0,460 | 0,452 | 0,433 | 0,414 | 0,396 | 0,379 | 0,364 | 0,350 |
Nato se določijo glavni parametri zobnikov.

Slika 9.1- Zunanje gonilo
APLIKACIJE

Naloge o splošnih temah strojništva


| Pri sestavljanju mehanizmov pritrdite | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkA 1 EkB | DkB 1 EkC | DkA 1 EkB | DkB 1 EkC | DkB 1 EkC | DkA 1 EkC | Število zob zobnika pritrjenega mehanizma | ||||||
| Številka glavnega mehanizma | Z 1 | Z/1 | Z 2 | Z/2 | Z 3 | Z/3 | ||||||||||||||||
| Število dodatnega (povezovalnega) mehanizma | ||||||||||||||||||||||
| - | ||||||||||||||||||||||
| - | ||||||||||||||||||||||
| - | ||||||||||||||||||||||
| Število zob glavnega mehanizma | Z/1 | - | - | - | - | |||||||||||||||||
| Z 1 | - | |||||||||||||||||||||
| Z 2 | - | |||||||||||||||||||||
| Z 3 | - | - | - | - | - | - | ||||||||||||||||
| Z/3 | - | - | - | - | - | |||||||||||||||||
| Z 4 | - | - | ||||||||||||||||||||
| Z/4 | - | - | - | - | ||||||||||||||||||
| Z 5 | - | - | - | - | ||||||||||||||||||
| Z 6 | - | - |




Kontrolni seznam
1. Mehanika strojev in njeni glavni deli;
2. Osnovni pojmi in definicije v teoriji mehanizmov;
3. vzvodni mehanizmi;
4. Odmični mehanizmi;
5. Zobniški mehanizmi;
6. Klinasti in vijačni mehanizmi;
7. Torni mehanizmi;
8. Mehanizmi z gibkimi povezavami;
9.
10. Mehanizmi z električnimi napravami;
11. Kinematični pari in njihova klasifikacija;
12. Konvencionalne slike kinematičnih parov;
13. Kinematične verige;
14. Strukturna formula splošne kinematične verige;
15. Stopnja gibanja mehanizma;
16. Strukturna formula ploščatih mehanizmov;
17. Struktura ploščatih mehanizmov;
18. Nadomestni mehanizmi;
19. Struktura prostorskih mehanizmov;
20. družine mehanizmov;
21. Osnovni princip oblikovanja mehanizmov in njihov klasifikacijski sistem;
22. Strukturna klasifikacija ploščatih mehanizmov;
23. Nekaj informacij o strukturni klasifikaciji prostorskih mehanizmov;
24. Težišča v absolutnem in relativnem gibanju;
25. Razmerja med hitrostmi povezav mehanizma;
26. Določanje hitrosti in pospeškov povezav kinematičnih parov;
27. Center za takojšnje pospeševanje in vrtljiva plošča;
28. Ovojne in ovojne krivulje;
29. Centroidna ukrivljenost in medsebojno ovijajoče krivulje;
30. Trajno in začetno premikanje mehanizma;
31. Določanje položajev povezav skupine in konstrukcija trajektorij, ki jih opisujejo točke povezav mehanizma;
32. Določanje hitrosti in pospeškov skupine 2. razreda;
33. Določanje hitrosti in pospeškov skupine 3. razreda;
34. Izdelava kinematičnih diagramov;
35. Kinematična študija mehanizmov z diagramsko metodo;
36. Štiri palični tečajni mehanizem;
37. ročično-drsni mehanizem;
38. Nihajni mehanizmi;
39. Opredelitev rezervacij;
40. Določanje hitrosti in pospeškov;
41. Osnovna kinematična razmerja;
42. Torni mehanizmi;
43. Mehanizmi tričlenskih zobnikov;
44. Mehanizmi veččlenskih zobnikov s fiksnimi osemi;
45. Mehanizmi planetnega gonila;
46. Mehanizmi nekaterih vrst menjalnikov in menjalnikov;
47. Zobniški mehanizmi z gibkimi povezavami;
48. Univerzalni zglobni mehanizem;
49. Mehanizem dvojnega univerzalnega zgloba;
50. Prostorski štiripalični tečajni mehanizem;
51. Vijačni mehanizmi;
52. Zobniški mehanizmi prekinjenega in izmeničnega gibanja gnanega člena;
53. Mehanizmi s hidravličnimi in pnevmatskimi napravami;
54. Glavni cilji;
55. Problemi izračuna moči mehanizmov;
56. Sile, ki delujejo na povezave mehanizma;
57. Diagrami sil, del in zmogljivosti;
58. Mehanske lastnosti strojev;
59. Vrste trenja;
60. Torno drsenje nenamazanih teles;
61. Trenje v translacijskem kinematičnem paru;
62. Trenje v vijačnem kinematičnem paru;
63. Trenje v rotacijskem kinematičnem paru;
Izračuni v tem razdelku bodo izvedeni v skladu z metodologijo, opisano v, na podlagi naslednjih začetnih podatkov:
Z 2 =57 - število zob drugega kolesa
Z 3 =58 - število zob tretje prestave
Z 4 = 20 - število zob četrte prestave
Z 5 =95 - število zob pete prestave
Z 6 =22 - število zob šestega zobnika
u 1 =2s -1 - kotna hitrost prve prestave
Oglejmo si strukturo tega zobniškega mehanizma.
Določimo število korakov v mehanizmu in podamo njihove značilnosti. Peto in šesto kolo tvorita najpreprostejši niz stopnic - ploščat zobniški mehanizem z notranjim zobnikom. Druga stopnja, sestavljena iz 1,2,3,4 zobnikov in ročice H - nosilca, je planetarna serija z dvovrstnim satelitom z dvema zunanjima zobnikoma.
Namen kinematične analize.
Namen kinematične analize je določiti prestavna razmerja posamezne stopnje in celotnega mehanizma kot celote ter kotne hitrosti posameznih določenih členov.
Določimo število zob Z 1.
Določimo manjkajoče število zob planetnega mehanizma Z 1. Za to uporabimo pogoj koaksialnosti osrednjih povezav. Označimo medcentrično razdaljo med centralno osjo in osjo vrtenja satelitov.
a=R 1 +R 2 - pogoj poravnave središčne povezave.
Z 1 = Z 3 + Z 4 - Z 2
Z 1 =58+20-57=21
Narišimo diagram zobniškega mehanizma v merilu.
µ z =95/95=1 1/mm
Določimo dimenzije s pomočjo segmenta, s pomočjo katerega bodo zobniki upodobljeni na kolesu.
L Z5 =Z k /µ z =95/1=95 mm
Kinematična analiza zobniškega mehanizma grafično.
Za izvedbo analize s to metodo je potrebno izvesti kinematični diagram mehanizma. Kinematično analizo začnemo z vhodne povezave.
V A =у 1 *R A =21m/s
V V = 1 * R V = 58 m/s
Izberimo merilo za izdelavo načrta za linearne hitrosti zobniškega mehanizma.
µ V =V A /(AO)=21/21=1(m/s)/mm
Za vhodno povezavo sestavimo načrt linearnih hitrosti. Za izdelavo načrta je dovolj poznati hitrosti dveh točk, saj je odvisnost linearna. Projiciramo na polne točke, katerih hitrosti so znane. Iz projekcije točk narišemo polne črte pravokotno na merilo, vektorje linearnih hitrosti označenih točk. Preidemo na vhodno povezavo, ki sledi vhodni. Na drugi povezavi najdemo dve točki, katerih hitrosti sta znani. Te točke projiciramo na polico. Za najdene točke izrišemo znane vektorje linearnih hitrosti. Na podlagi dveh znanih točk zgradimo načrt linearnih hitrosti. Na podlagi izdelanega načrta linearnih hitrosti bomo narisali diagram kotnih hitrosti členov. Skozi točko P narišemo ravne črte, vzporedne z zakoni porazdelitve linearnih hitrosti na linearnem načrtu hitrosti. Segmenti na žarkovnem diagramu z začetkom v točki O in koncem v točki ustrezne številke prikazujejo kotne hitrosti povezav, ker je kotna hitrost vhodne povezave znana, je lahko faktor lestvice za konstrukcijo diagrama odločen.
µ u = u 1 /O 1 =2/1=2
Če poznamo kotne hitrosti povezav, bomo določili prestavna razmerja vsake stopnje mehanizma in celotnega mehanizma kot celote.
Kinematična analiza zobniškega mehanizma z analitično metodo.
Ker je mehanizem sestavljen iz dveh stopenj, lahko njegovo skupno prestavno razmerje definiramo kot produkt prestavnih razmerij vseh njegovih stopenj. Najprej določimo prestavno razmerje najenostavnejše prestavne stopnje.
i 56 =Z 6 /Z 5 =22/95=0,23
Oglejmo si planetarni sklop. Kompleksnost kinematične analize planetarnega mehanizma je v tem, da sateliti izvajajo kompleksna gibanja in imajo zato kotno hitrost prenosnega gibanja in relativno kotno hitrost glede na nosilec. Za rešitev problema se uporablja načelo zaustavitve nosilca. Willisova metoda temelji na principu zaustavitve nosilca, katerega bistvo je naslednje. Planetarni mehanizem je mentalno zamenjan z obrnjenim mehanizmom.
Splošni mehanizem je zgrajen na naslednji način:
1) nosilec se šteje za mirujočega,
2) ker nosilec miruje, se kotna hitrost nosilca odšteje od kotnih hitrosti vseh členov,
3) za vsako prestavo lahko zapišete formulo za prestavno razmerje glede na število zob,
4) s pomočjo matematičnih transformacij lahko preidete od obrnjenega mehanizma do planetarnega mehanizma - originalnega in določite prestavna razmerja za planetarni mehanizem.
Naredimo mizo. Tabela bo vsebovala tri stolpce: 1) število delov, ki sestavljajo planetni mehanizem, 2) kotne hitrosti členov pri normalnem gibanju, 3) kotne hitrosti členov, ko je nosilec ustavljen.
i 12 = (w 2 - w H)/(w 1 - w H) = -2,7
i34 =(n2-nH)/(-nH)=-0,34
w 2 = w 3 =3,06
sch 1 H =2-2,28=-0,28
sch 2 H =3,06-2,28=0,78
sch 3 H =3,06-2,28=0,78
sch 4 H =0-2,28=-2,28
Določimo splošno prestavno razmerje celotnega mehanizma
2.2 Analiza zobniškega mehanizma
Za določitev prestavnega razmerja z grafično metodo upodabljamo dani mehanizem v merilu, pri čemer vzamemo poljubno vrednost modula (m = 10). Označimo vse značilne točke na mehanizmu - pole zobnikov in središča koles. Narišemo črto pravokotno na osi vrtenja koles in nanjo projiciramo vse značilne točke. Ker je vodilni člen kolo 1, linearno hitrost njegovega konca (točke A) predstavimo z vektorjem Aa poljubne dolžine. S povezavo točk a in O 1 dobimo premico porazdelitve linearnih hitrosti kolesa 1. Točko B povežemo s točko a, na nadaljevanje te premice pa projiciramo točko O 2, dobimo premico porazdelitve linearnih hitrosti. hitrosti kolesa 2. S povezavo točk O 2, O 4 dobimo premico porazdelitve linearnih kolesnih hitrosti 4. Na nadaljevanje premice Aa projiciramo točko A / . Točko a / povežemo s točko c, da dobimo razdelilno premico kolesa 5. Na to premico projiciramo točko O 5. Točko O 5 povežemo s točko O H, dobimo razdelilni vod za končno povezavo - nosilec.
Prestavno razmerje je določeno preko segmentov SH in S1
i 1Н = S 1 /S Н = 190/83 = 2,29
Ker sta segmenta SH in S1 na isti strani SP, dobimo prestavno razmerje s predznakom plus.
Imamo diferencialni mehanizem

Di = ×100 % = 3,9 %
2.3 Preverjanje izpolnjevanja pogojev poravnave, bližine in montaže planetnega mehanizma
Pogoj poravnave predstavlja enakost medosrednih razdalj zobniških parov
r 1 + r 2 = r 3 – r 2 ali z 1 + z 2 = z 3 – z 2
36 + 40 = 116 – 40 76 = 76
Pogoj poravnave je izpolnjen.
Pogoj sosedstva določa možnost postavitve vseh satelitov po obodu njihovih središč, ne da bi se dotikali drug drugega.
greh 
kjer je K število satelitov
Pri K= 2 sin>0,28
Sosedski pogoj je izpolnjen.
Montažni pogoj določa možnost hkratnega vključevanja vseh satelitov s centralnim kolesom. To pomeni, da bo vsota števila zob osrednjih koles večkratnik števila satelitov.
kjer je C poljubno pozitivno celo število.
![]()
Montažni pogoj je izpolnjen.
Tako planetni del določenega zobniškega mehanizma izpolnjuje vse konstrukcijske zahteve.
3 Izračun moči vzvodnega mehanizma
Možnost 20
Začetni podatki:
| LBC = 0,5 |
kjer so l i dolžine členov in razdalja do središč mase členov od njihovih začetnih tečajev, m;
J si – vztrajnostni momenti povezav, kgm 2;
m i – mase povezav, kg;
w 1 – kotna hitrost pogonskega člena, s -1;
P nc - uporabna sila upora, ki deluje na drsnik 5, N;
P j 5 – vztrajnostna sila 5. člena, N.
Potrebno je določiti izravnalno silo z metodo izolacije strukturnih skupin in metodo togega vzvoda N. E. Žukovskega, tlak v vseh kinematičnih parih.
Nariši načrt mehanizma v merilu m l
m l = l OA /OA = 0,2/40 = 0,005 m/mm.
Izdelamo načrt hitrosti, zasukan za 90° glede na merilo
m v = V A /Pa = w 1 ×l OA /Pa = 60×3,14×0,2/94,2 = 0,4 m/s/mm.
Hitrost točke B bomo določili z rešitvijo dveh vektorskih enačb
V B = V A +V BA, V B = V C +V pr.
Točka d na načrtu hitrosti je določena s podobnostnim izrekom
BC/DC = Pb/Pd Pd = Pb×CD/BC = 64×40/100 = 25,6 mm. Za določitev hitrosti točke E sestavimo vektorsko enačbo V E = V D +V ED in jo rešimo. Izdelamo načrt pospeševanja, zasukanega za 180° glede na merilo
m a = a A /pa=w 1 2 ×l OA /pa = (60×3,14) 2 ×0,2/101,4 = 70 m / s 2 /mm.
Pospešek točke B je določen glede na točki A in C
a B = a A + a n BA + a t BA, a B = a C + a n CB + a t CB,
a n BA = w 2 2 ×l AB = (ab×m v / l AB) 2 × l AB = (84×0,4/0,6) 2 × 0,6 = 1881,6 m/s 2
a n BC = w 3 2 ×l BC = (Pb×m v / l BC) 2 × l BC = (64 × 0,4/0,5) 2 × 0,5 = 1310,7 m/s 2
Dolžine segmentov, ki prikazujejo normalne komponente pospeška
a n BA in a n BC na pospeševalnem načrtu, določen ob upoštevanju merila m a
an BA = a n BA /m a = 1881,6/70 = 26,9 mm
pn BC = a n BC /m a = 1310,7/70 = 18,7 mm
Položaj točke d na načrtu pospeševanja je določen s podobnostnim izrekom
BC/DC = πb/πd πd = πb×CD/BC = 58×40/100 = 23,4 mm. Za določitev pospeška točke E sestavimo in rešimo vektorsko enačbo a E = a D +a n ED +a t ED. kjer je a n ED =w 4 2 ×l ED =(V ED /l ED) 2 ×l ED = (de×m v /l DE) 2 ×l DE = (14×0,4) 2 /0,7 = 44,8 m / s 2 /mm
Dolžina odseka na načrtu pospeševanja
dn ED = a n ED /m a = 44,8/70 = 0,64 mm
Položaj točk S 2, S 3, S 4 na načrtu pospeševanja je določen s podobnostnim izrekom iz razmerij
AB/AS 2 = ab/aS 2 Þ aS 2 = ab×AS 2 /AB = 45×40/120 = 15 mm
BC/CS 3 = pb/pS 3 Þ pS 3 = pb×CS 3 /BC = 58×20/100 = 11,6 mm
DE/DS 4 = de/dS 4 Þ ds 4 = de×DS 4 /DE = 19×60/140 = 8,14 mm
Določanje vztrajnostnih sil povezav
Pri določanju vztrajnostnih sil in momentov upoštevamo, da je načrt pospeška izdelan zasukan za 180°, zato pri izračunih izpustimo znak minus.
P j2 = m 2 × a s2 = m 2 × ps 2 × m a = 60 × 86 × 70 = 361200 N
M j2 = J s2 ×e 2 = J s2 ×a t BA /l AB = J s2 ×n BA b×m a /l AB = 0,1×39×70/0,6 = 455 H×m
P j3 = m 3 × a s3 = m 3 × ps 3 × m a = 50 × 12 × 70 = 42000 H
M j3 = J s3 ×e 3 = J s3 ×a t BA /l B C = J s3 ×n B C b×m a /l B C = 0,06×55×70/0,5 = 462 H×m
P j4 = m 4 × a s4 = m 4 × ps 4 × m a = 50 × 21 × 70 = 73500 H
M j4 = J s4 ×e 4 = J s4 ×a t ED /l DE = J s4 ×n ED e×m a /l DE = 0,12×19×70/0,7 = 228 H×m
P j 5 = m 5 × a E = m 5 × pe × m a = 140 × 22 × 70 = 215600 H
Uporabna sila upora, ki deluje na delovni člen (5)
P nc = -2 P j 5 = - 431200 H
Rezultanta v točki E R 5 = P j 5 + P nc = -215600 H Izračunane sile in momente narišemo na načrt mehanizma. V točkah S 2 , S 3 , S 4 delujejo vztrajnostne sile, v točkah A in E pa ravnotežna sila - P y in posledična sila - R 5.
Pod vplivom uporabljenih sil je mehanizem v ravnovesju. Izberemo prvo strukturno skupino (povezavi 4,5) in upoštevamo njeno ravnotežje. V točkah D in E za uravnoteženje strukturne skupine uporabimo reakciji R 34 in R 05.
Ustvarimo enačbo ravnotežja
SM D = 0, P j4 ×h 4 µl + R 5 ×h 5 µl + R 05 ×h 05 µl - M j4 = 0
R 05 = (-P j4 × h 4 µ l - R 5 × h 5 µ l + M j4)/h 05 µ l = (-73500 × 2∙0,005- 215600 × 62∙0,005 + 228)/126∙ 0,005 = -106893,6 N
SP i = 0. P j 4 + R 5 + R 05 + R 34 = 0. Sprejemamo merilo načrta sil
m p 1 = P j 4 /z j 4 = 73500/50=1470 N/mm
Na tem merilu zgradimo poligon sil, iz katerega najdemo
R 34 = z 34 × m p 1 = 112 × 1470 = 164640 H
Identificiramo in upoštevamo ravnotežje druge strukturne skupine (povezavi 2,3). Za uravnoteženje uporabljamo:
v točki D – reakcija R 43 = - R 34;
v točki A - reakcija R 12;
v točki C – reakcija R03.
SM B2 = 0, P j 2 × h 2 µ l - R t 12 × AB × µ l + M j 2 = 0,
R t 12 = (P j 2 × h 2 µ l + M j 2)/AB × µ l = (361200 × 50∙0,005 + 455)/120 × 0,005 = 151258,3 H
SM B3 = 0, P j 3 ×h 3 ×µ l + R t 03 ×BC×µ l +R 43 ×h 43 ×µ l - M j 3 = 0
R t 03 = - P j 3 × h 3 × µ l -R 43 × h 43 × µ l + M j 3 /BC × µ l,
R t 03 = - 42000×76×0,005-164640×31×0,005 + 462/100×0,005 = - 82034,4 N SP i = 0, R t 12 + P j 2 + R 43 + P j 3 + R t 03 + R n 03 + R n 12 = 0 . Sprejemamo merilo načrta sil za to strukturno skupino
m p 2 = P j 2 /z j 2 = 361200/100 = 3612 N/mm
Iz poligona sil določimo nastalo reakcijo
R 12 = R n 12 + R t 12 in njegova vrednost
R 12 = z 12 × m p 2 = 79 × 3612 = 285348 H
Upoštevamo ravnovesje preostalega prvorazrednega mehanizma. V točki O zamenjamo stojalo z reakcijo R 01 poljubne smeri.
Sestavljanje ravnotežnih enačb
SM 0 = 0, P y × OA - R 21 × h 21 = 0.
Ravnotežna sila
P y = R 21 × h 21 /OA = 79935,9 H
SP i = 0, P y + R 21 + R 01 = 0.
Lestvica načrta sile
m p 3 = R 21 /z 21 = 2850 N/mm
Iz trikotnika sil najdemo reakcijo R 01
R 01 = z 01 × m p 3 = 99 × 2850 = 282150 H
Tlak določamo v kinematskih parih.
Kinematični par B (povezavi 2,3). Upoštevamo enačbo ravnotežja povezave R 12 + P j 2 + R 32 = 0. Za njeno rešitev uporabimo načrt sil strukturne skupine (2.3). Zaključni vektor z 32 je prikazan s pikčasto črto.
R 32 = z 32 ×m p 2 = 24 × 3612 = 86688 H Tlak v kinematičnem paru E (povezave 4.5) določimo iz rešitve vektorske enačbe R 5 + R 05 + R 45 = 0 R 45 = z 45 ×m p 1 = 162 × 1470 = 238140 N V tabeli povzamemo vrednosti tlaka v vseh kinematičnih parih obravnavanega mehanizma. Tabela 4 - Vrednosti tlaka v kinematičnih parih mehanizma
| kinematična | 0 | A | IN | Z | D | ||
| Imenovanje | |||||||
| Vrednost, N | 282150 | 285348 | 86688 | 122808 | 164640 | 238140 | 106893.6 |
Za določitev izravnalne sile po metodi N.E. Žukovskega narišemo načrt hitrosti, zasukano za 90° v pomanjšanem merilu. Na tej risbi ta načrt hitrosti sovpada z načrtom hitrosti mehanizma. S podobnostnim izrekom določimo položaje točk S 2, S 3, S 4 na načrtu hitrosti.
AS 2 /AB = ak 2 /ab Þ as 2 = ab×AS 2 /AB = 84×40/120 = 28 mm
CS 3 /CB = Ps 3 /Pb Þ Ps 3 = Pb×CS 3 /CB = 64×20/100 = 12,8 mm
DS 4 /DE = dk 4 /de Þ ds 4 = de×DS 4 /DE = 14×60/140 = 6 mm
1.4 Izdelava diagrama pomikov izhodne povezave. Diagram pomikov izhodne povezave dobimo kot rezultat konstruiranja segmentov, ki so vzeti iz risbe ploščatega vzvodnega mehanizma v 12 položajih, ob upoštevanju faktorja lestvice 1,5 Konstrukcija hitrostnega diagrama izhodne povezave. Diagram hitrosti izhodne povezave dobimo kot rezultat grafičnega razlikovanja...
24 0,00 0,00 14,10 14,10 9,30 9,30 58,02 58,02 2.4 Študij mehanizma z metodo kinematičnih diagramov Študij mehanizmov z metodo diagramov poteka s cilji: 1. Pridobiti vizualno predstavitev zakona gibanja zanimiva točka za nas ali povezava mehanizma. 2. Določanje hitrosti in pospeškov točk ali povezav na podlagi znanega zakona premikanja točk oz.